高性能计算复习
22-23真题解析
选择
RISC与CISC的区别
答案:C
- 选项A错误:RISC指令条数少只是表面特征,并非速度快的根本原因。实际上,完成相同功能,RISC通常需要更多条指令(因为单条指令功能简单)。
- 选项B错误:RISC的目标程序通常更长,而非更短。因为复杂操作需要多条简单指令组合实现,这是RISC将硬件复杂性转移给编译器的体现。
- 选项C正确:根据计算机性能公式:程序执行时间 = 指令数 × CPI(每条指令平均时钟周期数) × 时钟周期时间。RISC的核心优势在于CPI极低(绝大多数指令单周期执行),虽然指令数可能比CISC多,但CPI的大幅降低带来了整体执行速度的提升。
- 选项D错误:”只允许load和store指令访存”是RISC的重要设计特点(加载-存储架构),但它是导致CPI较低的原因之一,而非RISC速度更快的直接、根本原因。
RISC 与 CISC 核心区别对照表:
| 对比维度 | RISC(精简指令集计算机) | CISC(复杂指令集计算机) |
|---|---|---|
| 指令集设计 | 指令条数少,格式规整,长度固定 | 指令丰富,格式多样,长度可变 |
| 指令复杂度 | 单条指令功能简单,一条指令只完成一个基本操作 | 单条指令功能强大,一条指令可完成多步复杂操作 |
| 访存方式 | Load-Store 架构:只有 load 和 store 指令能访问内存,运算类指令只能在寄存器间操作 |
寄存器-内存架构:运算类指令可直接访问内存操作数 |
| CPI | 极低,绝大多数指令单周期执行(目标 CPI ≈ 1) | 较高,复杂指令需要多个时钟周期(CPI 通常 > 1) |
| 指令数(完成相同功能) | 较多,复杂操作需多条简单指令组合 | 较少,一条复杂指令即可完成 |
| 目标程序长度 | 较长(指令数多) | 较短(指令数少) |
| 硬件复杂度 | 低,控制器多采用硬连线(Hard-wired),设计简单 | 高,控制器通常采用微程序(Micro-programmed),设计复杂 |
| 编译器复杂度 | 高,硬件复杂性转移到编译器,需要编译优化来调度指令、分配寄存器 | 低,编译器工作相对简单 |
| 寻址方式 | 少,通常只有几种基本寻址方式 | 多,支持多种复杂寻址方式 |
| 寄存器数量 | 多,大量通用寄存器(通常 32 个以上),减少访存次数 | 少,寄存器数量有限 |
| 流水线实现 | 容易,指令格式固定、执行时间均匀,天然适合流水线 | 困难,指令长度不一、执行时间差异大,流水线设计复杂 |
| 设计哲学 | 20% 的简单指令覆盖 80% 的使用场景,让常用指令跑得更快 | 用硬件直接支持复杂操作,减少程序需要执行的指令条数 |
| 典型代表 | ARM、MIPS、RISC-V、PowerPC | x86(Intel/AMD)、VAX |
一句话总结:RISC 用更多条简单指令换更低的 CPI,靠流水线效率取胜;CISC 用更少条复杂指令完成任务,但 CPI 高。在现代高性能处理器中,两者界限已逐渐模糊——x86 内部将复杂指令译码为类 RISC 微操作执行,RISC 也吸收了一些 CISC 特性来提升代码密度。
计算机系统结构创新与摩尔定律

答案:D
- 选项A错误:器件更新换代(摩尔定律)是过去几十年计算机性能提升的主要动力,但目前晶体管尺寸已接近物理极限,摩尔定律显著放缓,单纯依靠工艺进步带来的性能提升越来越有限。
- 选项B错误:软件发展可以优化程序执行效率,但它是在硬件基础上的改进,无法从根本上突破硬件架构的性能瓶颈。
- 选项C错误:操作系统更新主要提升系统的兼容性、安全性和资源管理效率,对整体计算性能的提升幅度有限,不是核心推动力。
- 选项D正确:在摩尔定律失效的背景下,计算机系统结构的创新已成为未来性能提升的主要途径,包括多核架构、异构计算、专用加速器(GPU/TPU/NPU)、RISC架构、3D堆叠、存算一体等技术,这些都属于系统结构层面的突破。
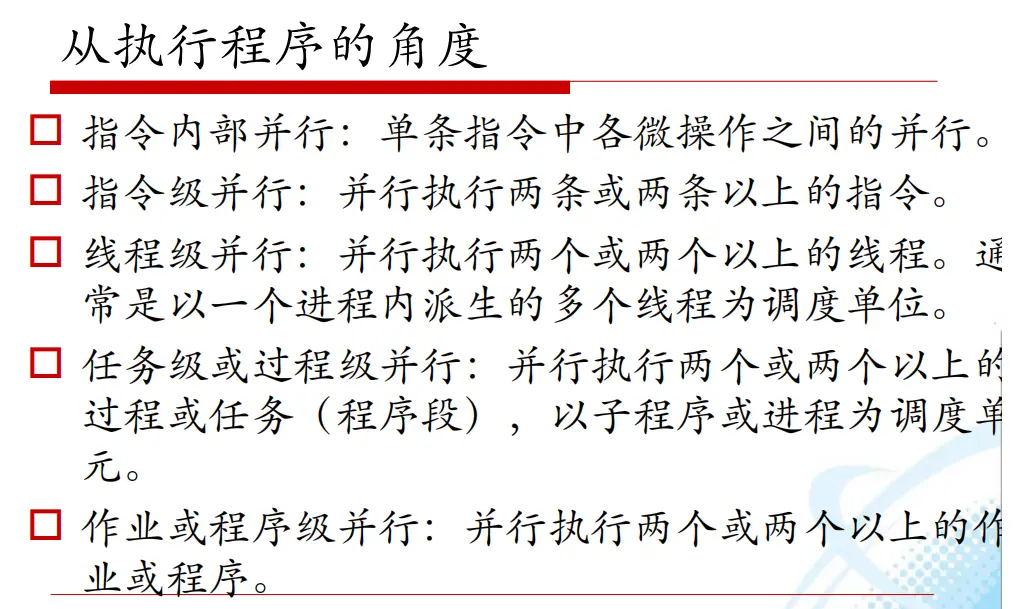
并行性的三大基本技术途径
答案:D
提高计算机系统并行性的三大基本技术途径是:
- A. 时间重叠:让多个任务在时间上重叠执行,典型代表是流水线技术,属于时间维度的并行。
- B. 资源共享:多个任务分时共享同一套硬件资源,典型代表是多道程序、分时系统,通过软件调度实现宏观上的并行。
- C. 资源重复:通过重复设置硬件资源来实现并行,典型代表是多核CPU、多处理器系统、阵列处理机,属于空间维度的并行。
D. 专用硬件加速:这是一种性能优化手段(如GPU、TPU、NPU等),通过定制硬件加速特定任务,但它不属于提高并行性的基本技术途径,而是并行技术在特定领域的应用实现。
兼容原则
答案:C
系列机软件兼容性的核心原则如下:
- 向后兼容(必须做到):新机型能够运行旧机型上的所有软件。这是系列机最基本的要求,目的是保护用户已有的软件投资,确保用户升级硬件后原有业务不受影响。
- 向前兼容(一般不要求):旧机型能够运行新机型上的软件。这通常无法实现,因为新软件会利用新硬件的新增指令和特性,旧硬件不具备这些能力。
- 向上兼容(力争做到):同系列低档机型的软件能够在高档机型上正常运行。这是系列机设计的重要目标,方便用户从低档机平滑升级到高档机,获得更好的性能。
- 向下兼容(一般不要求):高档机型的软件能够在低档机型上运行。这通常无法实现,因为高档机软件可能依赖只有高档机才具备的硬件资源和性能。
因此,系列机软件应做到向后兼容(硬性要求),力争向上兼容(优化目标)。
Flynn计算机分类方法与多处理机

相关PPT
答案:D
弗林(Flynn)分类法是根据计算机系统中指令流和数据流的并行性程度进行分类,多处理机的归属如下:
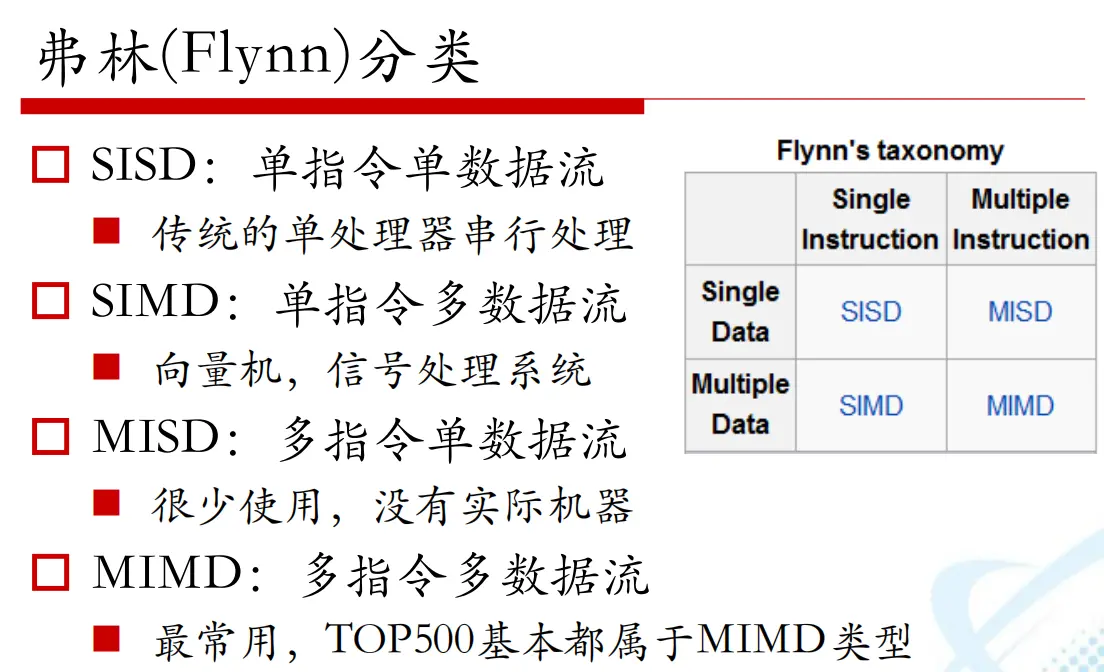
| 类别 | 名称 | 描述 | 典型代表/地位 |
|---|---|---|---|
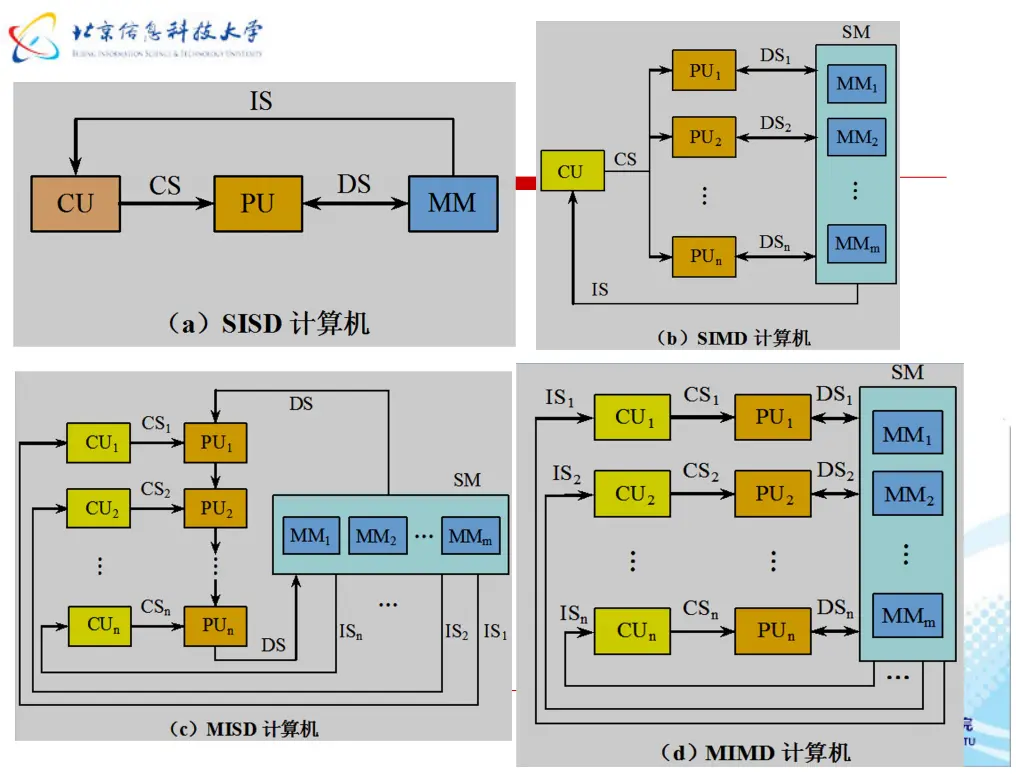
| SISD | 单指令流单数据流 | 传统的单核串行计算机,同一时刻只能执行一条指令、处理一个数据。 | 早期串行计算机 |
| SIMD | 单指令流多数据流 | 同一时刻执行同一条指令,但同时处理多个不同的数据。 | GPU、向量处理器、阵列处理机 |
| MISD | 多指令流单数据流 | 多条不同的指令同时处理同一个数据,这种结构在实际中几乎没有应用,仅存在于理论研究。 | 仅理论研究 |
| MIMD | 多指令流多数据流 | 多个处理器同时执行不同的指令流,处理不同的数据流。多处理机系统(包括多核CPU、多处理器服务器、计算机集群)都属于这一类别。 | 目前主流的并行计算机结构 |
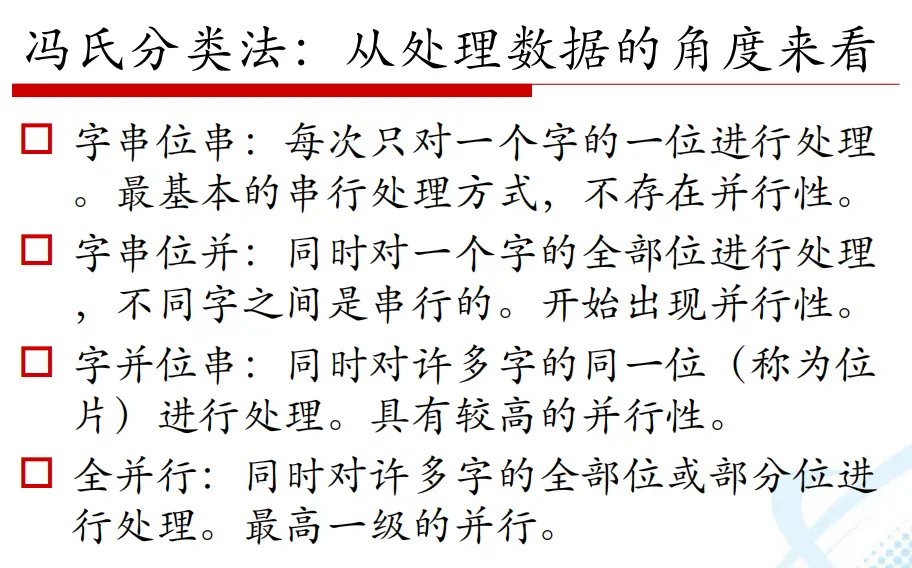
其他分类法
判断
性能判断标准
![]()
答案:正确(√)
对于特定程序,执行时间是衡量计算机系统性能最直接、最可靠的标准。它直接反映了计算机完成该任务的实际快慢,符合”完成相同工作,时间越短性能越高”的基本性能定义。
主频、MIPS、CPI等都是间接性能指标,存在明显局限性:
- 主频高不代表实际执行速度快(不同架构的指令效率不同)
- MIPS无法比较不同指令集架构的性能
- CPI需要结合指令数和时钟周期才能计算实际性能
| 指标 | 英文全称 | 含义 | 说明 |
|---|---|---|---|
| CPI | Cycles Per Instruction | 每条指令平均时钟周期数 | RISC的核心优势在于CPI极低,绝大多数指令单周期执行 |
| 程序执行时间 | Program Execution Time | 完成程序所需的实际时间 | 衡量性能最直接、最可靠的标准 |
| 主频 | Clock Frequency | CPU的时钟频率 | 高主频不代表实际执行速度快(不同架构指令效率不同) |
| MIPS | Million Instructions Per Second | 每秒执行百万条指令数 | 无法比较不同指令集架构的性能 |
| 时钟周期时间 | Clock Cycle Time | 一个时钟周期的时间长度 | 与主频互为倒数,用于性能公式计算 |
性能计算公式
其中各符号含义如下:
- T_exec:程序执行时间(Execution Time)
- N_instr:指令数(Instruction Count)
- CPI:每条指令平均时钟周期数(Cycles Per Instruction)
- T_clk:时钟周期时间(Clock Cycle Time)
软件硬件接口
![]()
答案:错误(×)
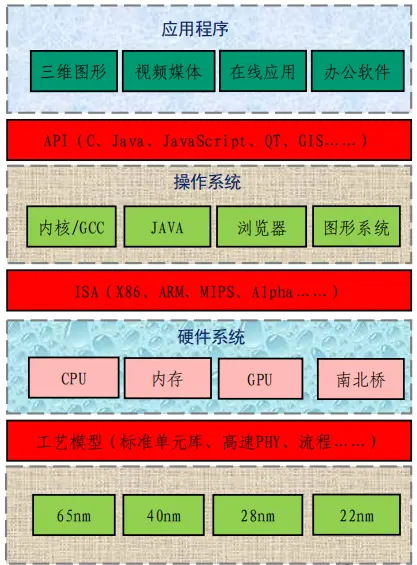
计算机系统中,软件和硬件的真正接口是指令集架构(ISA),而非操作系统:
- 指令集架构(ISA):定义了硬件能够识别和执行的指令集合、寄存器、寻址方式等,是硬件设计的依据,也是所有软件(包括操作系统)最终编译执行的基础。
- 操作系统:是运行在ISA之上的系统软件,它是用户与计算机硬件之间的接口,为上层应用程序提供了进程管理、内存管理、文件系统等高级抽象服务,但它本身也是软件的一部分。
主存 - 辅存 与 主存 - cache

答案:正确(√)
计算机存储系统采用层次化设计,不同层次解决不同的问题:
- “主存-辅存”层次(虚拟存储系统):辅存(硬盘、SSD等)具有容量大、价格低的特点,但访问速度远慢于主存。该层次通过虚拟存储技术,将主存和辅存统一编址,为用户提供一个容量接近辅存、速度接近主存的虚拟地址空间,核心目的是弥补主存容量的不足。
- “Cache-主存”层次(高速缓冲存储系统):Cache(高速缓存)速度接近CPU,但容量小、价格高。该层次利用程序的局部性原理,将CPU近期可能频繁访问的数据和指令从主存复制到Cache中,核心目的是弥补主存速度(性能)的不足,解决CPU与主存之间的速度不匹配问题。
摩尔定律内容

答案:错误(×)
摩尔定律的原始且核心表述是:集成电路上可容纳的晶体管数目,约每隔18-24个月便会增加一倍,同时芯片的性能也将提升一倍或成本降低一半。
题目中的说法是对摩尔定律的常见误解:
- 时钟频率的提升只是早期晶体管数量增加带来的结果之一,并非摩尔定律本身的内容
- 大约从2005年开始,由于功耗和散热的物理限制,单芯片的时钟频率提升已经基本停滞
- 现代处理器主要通过增加核心数量、改进架构和采用异构计算来提升性能,而非单纯提高时钟频率
集群

答案:错误(×)
计算机集群的定义是一组通过网络连接的计算机,在集群软件的统一管理和调度下协同工作,对外表现为一个单一的系统。
仅仅将N台服务器通过网络物理连接起来,并不能构成集群。真正的集群还必须具备以下核心要素:
- 集群管理软件:负责节点发现、状态监控和资源管理
- 任务调度系统:能够将任务分配到不同的服务器节点上执行
- 协同工作机制:节点之间可以通信、数据共享和负载均衡
- 高可用机制:当部分节点故障时,任务可以自动转移到其他节点
没有这些软件层面的支持,这些服务器只是相互独立的个体,无法协同完成任务,也就不能称为集群系统。
常见集群实例:
- Redis 哨兵(Sentinel)模式:多个 Redis 节点组成集群,哨兵进程监控主从节点状态,当主节点故障时自动完成故障转移,保证服务的高可用性。
- Nginx 负载均衡:Nginx 作为反向代理,将客户端请求分发到后端多台服务器,实现流量分摊和故障自动剔除,对外表现为单一入口。
- Kubernetes 容器集群:通过 Master 节点统一管理多个 Worker 节点,自动调度容器、实现服务发现和弹性伸缩。
- Hadoop 分布式集群:HDFS 将数据分散存储在多个 DataNode 上,YARN 统一调度计算任务到各节点执行,实现大规模数据的分布式处理。
计算题
CPI、MIPS 与执行时间计算
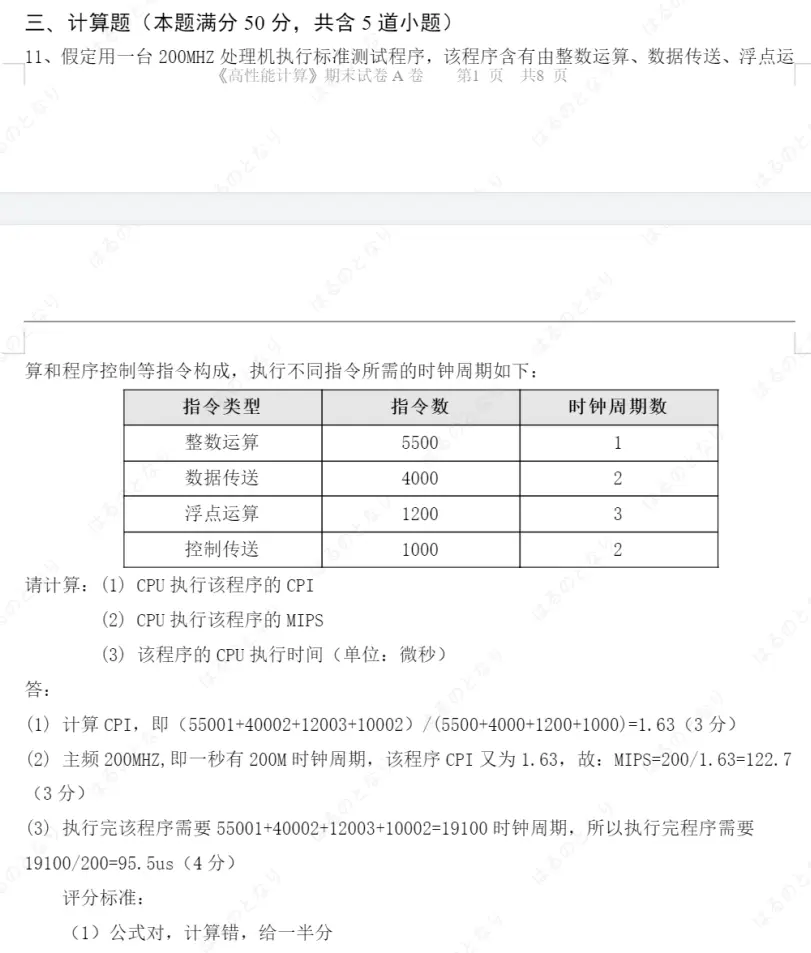
题目: 假定用一台 200 MHz 处理器执行标准测试程序,该程序含有整数运算、数据传送、浮点运算和控制传送等指令,各类指令的数量和所需时钟周期数如下:
| 指令类型 | 指令数 | 时钟周期数 |
|---|---|---|
| 整数运算 | 5500 | 1 |
| 数据传送 | 4000 | 2 |
| 浮点运算 | 1200 | 3 |
| 控制传送 | 1000 | 2 |
请计算:
- CPU 执行该程序的 CPI
- CPU 执行该程序的 MIPS
- 该程序的 CPU 执行时间(单位:微秒)
解答:
在动手计算之前,先理清三个指标的含义和它们之间的关系:
什么是 MIPS?
MIPS 是 Million Instructions Per Second 的缩写,意为”每秒执行百万条指令数“,是衡量 CPU 运算速度的一个经典性能指标。
它的核心思想很简单:同样运行一秒钟,能执行更多指令的 CPU 当然更快。计算公式为:
也可以直接用主频和 CPI 推导:
为什么除以 10⁶? 因为 1 MHz = 10⁶ Hz,除以 10⁶ 就把结果换算成了”百万条”的单位。例如主频 200 MHz,如果 CPI = 1,那理想情况下每秒能执行 200 × 10⁶ 条指令,即 200 MIPS。
但要注意:MIPS 是一个”不太靠谱”的性能指标。不同指令集架构(ISA)的指令复杂度差异很大——一条 x86 的复杂指令可能顶得上好几条 RISC 的简单指令。所以 MIPS 只适合在同架构、同指令集的 CPU 之间比较,跨架构比较会失真。这也是为什么现代评测更倾向用 SPEC 等真实程序基准测试,而不是单纯看 MIPS。
三个指标的关系脉络:
- CPI → 反映”每条指令要吃掉多少个时钟周期”(由程序指令 mix 和 CPU 微架构决定)
- 主频 → 反映”每秒钟有多少个时钟周期”(由 CPU 制造工艺决定)
- MIPS → 由前两者共同决定:主频越高、CPI 越低,MIPS 就越高
- 执行时间 → 最终的实际耗时,是衡量性能最直观、最可靠的指标
首先,计算总指令数和总时钟周期数:
(1) CPI(每条指令平均时钟周期数)
(2) MIPS(每秒执行百万条指令数)
(3) CPU 执行时间
答案:
- (1) CPI ≈ 1.63
- (2) MIPS ≈ 122.51
- (3) 执行时间 = 95.5 μs
阿姆达尔定律(Amdahl’s Law)

相关PPT截图有很多例题
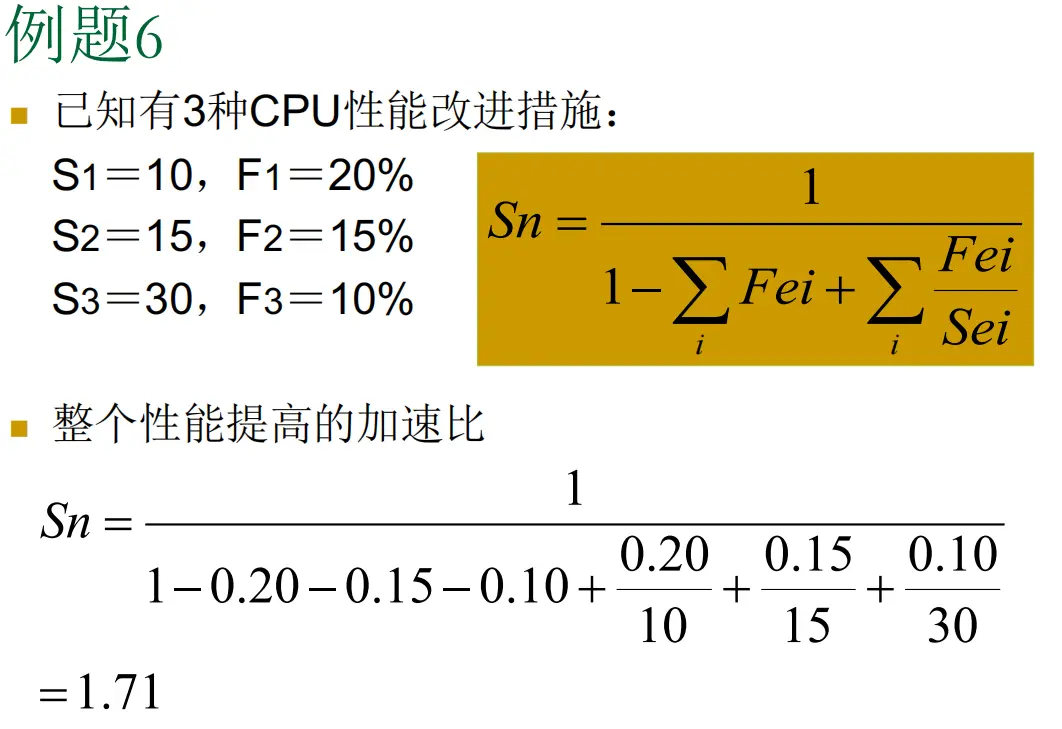
题目: 某计算机系统有三个部件可以改进,这三个部件的加速比为:
| 部件 | 加速比 |
|---|---|
| 部件 1 | 20 |
| 部件 2 | 25 |
| 部件 3 | 5 |
(1) 根据 Amdahl 定律,请写出系统加速比的公式;
(2) 如果部件 1、部件 2 和部件 3 的可改进比例为 20%、15% 和 25%,求整个系统的加速比。
解答:
(1) 多部件改进的系统加速比公式
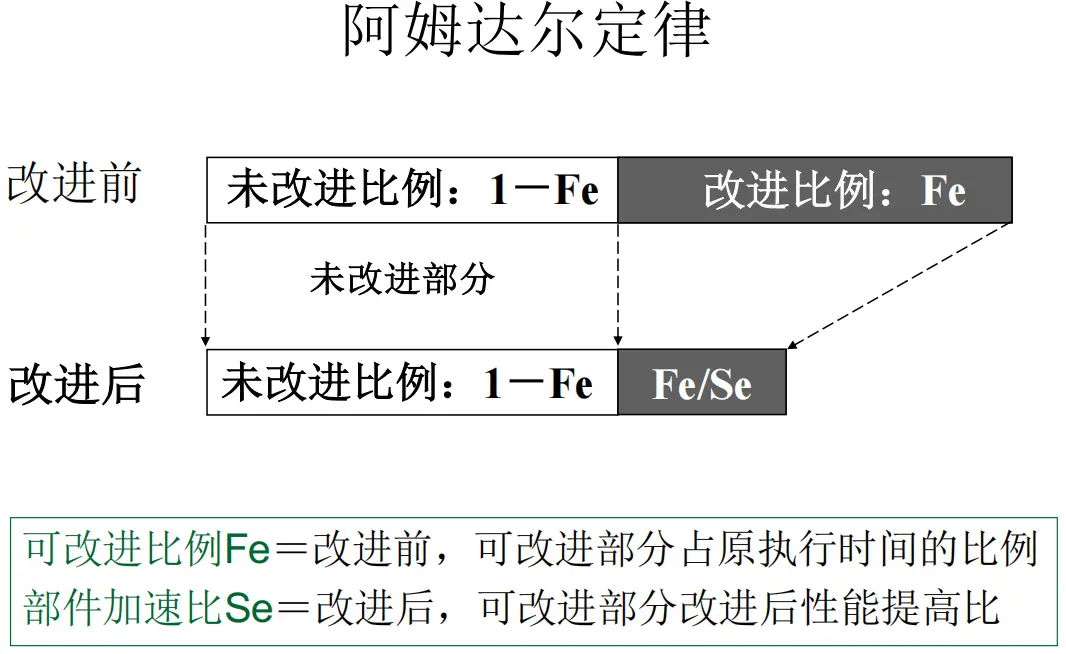
阿姆达尔定律的标准形式只考虑一个可改进部件。当系统中有多个部件同时被改进时,需要对公式进行推广。核心思路与单部件相同:将改进后的执行时间拆成两部分——不可改进的串行时间 和 各改进部件优化后的时间。
设有 $n$ 个可改进部件,推广后的系统加速比公式为:
各符号含义:
| 符号 | 含义 | 说明 |
|---|---|---|
| 系统整体加速比 | 改进后总执行时间与改进前的比值 | |
| 第 $i$ 个部件的可改进比例 | 该部件原始执行时间占系统总执行时间的比例() | |
| 第 $i$ 个部件的加速比 | 该部件单独改进后的性能提升倍数() | |
| 所有可改进部分的总比例 | 各部件可改进比例之和,必须 | |
| 不可改进的串行部分比例 | 无法被优化的那部分代码,它是加速比的”天花板” |
对于本题三个部件的情况,公式展开为:
(2) 代入已知条件计算
步骤一:整理已知条件
| 部件 | 可改进比例 | 加速比 | 改进后贡献 |
|---|---|---|---|
| 部件 1 | 20 | ||
| 部件 2 | 25 | ||
| 部件 3 | 5 |
步骤二:计算不可改进部分
步骤三:计算改进后的总贡献
步骤四:计算系统加速比
答案:
- (1) 系统加速比公式:
- (2) 整个系统的加速比约为 $2.15$(或精确值为 )
为什么结果这么”低”? 三个部件的加速比分别是 20、25、5,看起来都很夸张,但别忘了它们的可改进比例加起来只有 60%,剩下 40% 的串行代码完全无法优化。即使你把并行部分优化到无穷快,那 40% 的串行部分也会死死拖住后腿——这就是阿姆达尔定律的残酷真相。换句话说,优化串行部分的比例比单纯提升并行部分的性能更重要。
补充:单部件加速的阿姆达尔定律例题详解
PPT 中还有两道关于单部件改进的经典例题(例题 5-1 和 5-2),下面给出比 PPT 更详细的推导和解读。
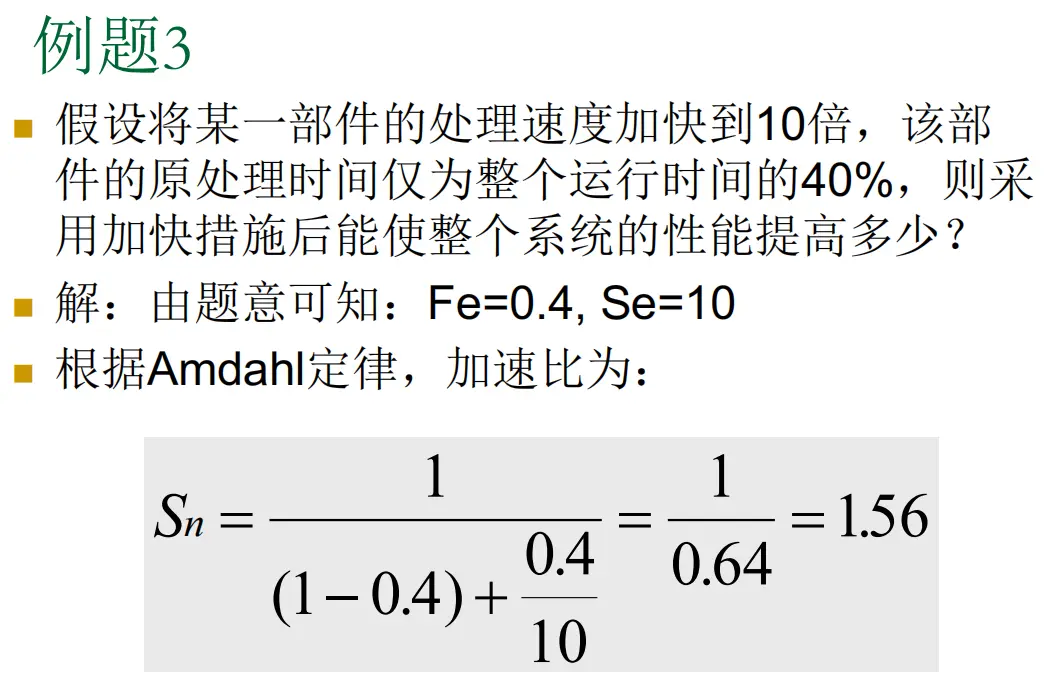
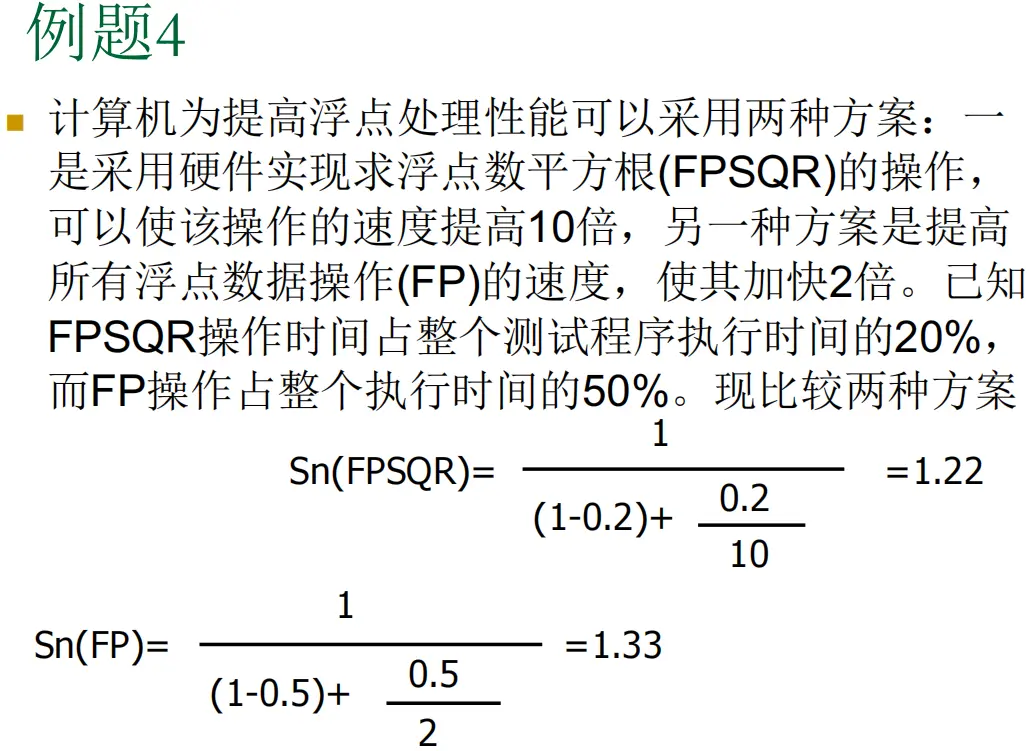
例题 5-1: 考虑将系统中某一功能的处理速度加快 $10$ 倍。
(1) 如果该功能的处理使用时间为整个系统运行时间的 ,则采用此增强功能方法后,能使整个系统的性能提高多少?
(2) 如果要使系统性能提高(加速比)为 $2$,则该功能应该占多少比例?
符号约定(与 PPT 一致):
| 符号 | 含义 |
|---|---|
| 被增强功能部分的局部加速比(Enhancement Speedup) | |
| 被增强功能部分在原始系统中占的时间比例(Fraction Enhanced) | |
| 整个系统的全局加速比(Speedup of the whole system) |
核心公式推导:
阿姆达尔定律最朴素的思想是:把系统总执行时间拆成可改进部分和不可改进部分。
设原始系统总执行时间为 ,则:
- 可改进部分耗时:
- 不可改进部分耗时:
改进后,可改进部分的速度提升为原来的 倍,因此改进后的耗时变为:
系统加速比定义为”原始时间 / 改进后时间”:
这个公式就是单部件阿姆达尔定律的标准形式。
(1) 已知 ,,求
直接代入公式:
PPT 中给出的结果是 $1.56$,这是四舍五入保留两位小数后的值。
直观理解:你把系统 的时间加速了 $10$ 倍,但这 的时间改进后只占原来的 。新的总时间构成为:(未变)(已改进),所以整体只快了约 $1.56$ 倍。也就是说,局部 10 倍的优化,换到全局只有 1.56 倍,这就是阿姆达尔定律的”天花板效应”。
(2) 已知 ,,求
这道题是反向求解,需要从加速比公式中解出 。
从标准形式出发:
先化简分母:
于是:
两边取倒数:
移项:
化为百分数:
PPT 给出的结果正是 。
直观理解:如果你想让整个系统快 $2$ 倍,那么改进后的总执行时间必须是原来的 。由于不可改进部分始终占 ,这部分不能缩短,因此它不能超过 。换句话说:
这说明可改进部分至少要超过一半。再结合局部加速比只有 $10$ 倍,最终精确计算出需要 。
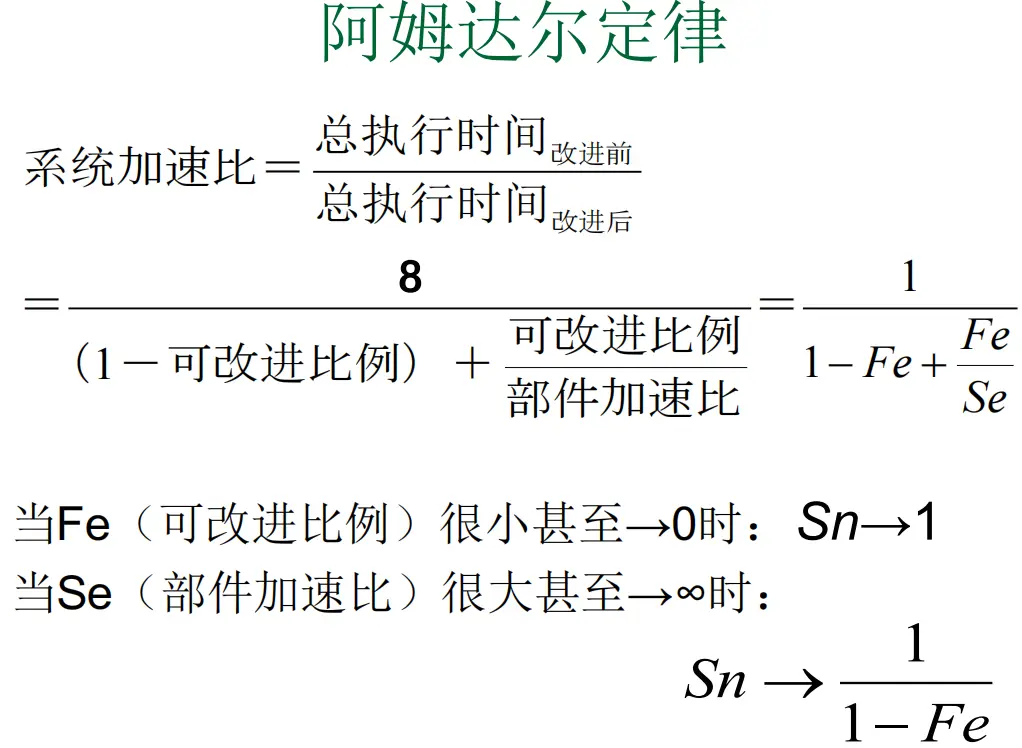
一个有趣的极端:如果 (该功能被优化到瞬间完成),公式退化为 。此时要使 ,只需 。也就是说,即使你把该功能优化到无穷快,如果它原来只占 ,全局加速比也永远到不了 2。这就是阿姆达尔定律给并行优化泼的冷水。
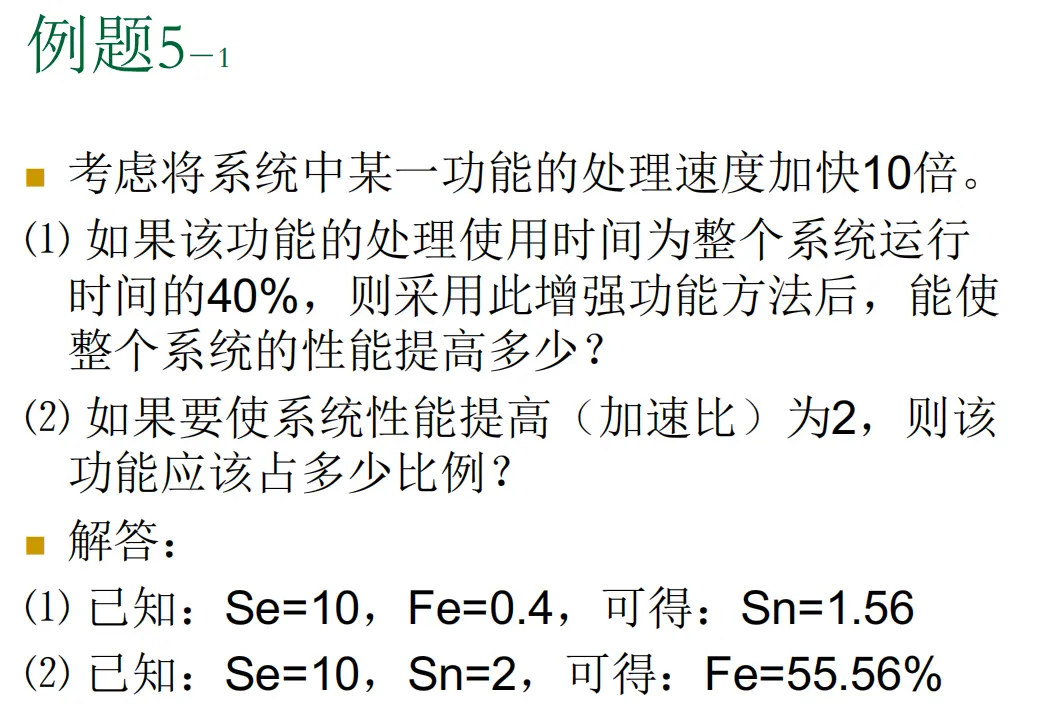
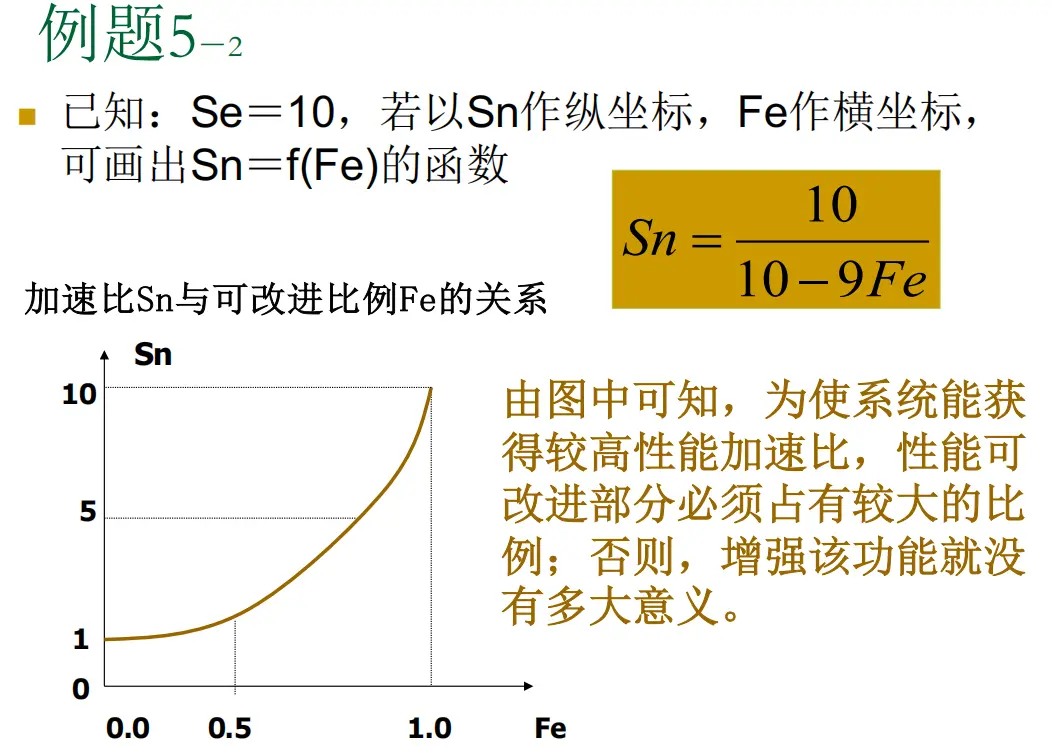
例题 5-2: 与 的函数关系
PPT 中给出了 时, 关于 的函数图像。下面推导这个函数的显式表达式。
从单部件阿姆达尔定律:
通分整理分母:
因此:
这就是 PPT 中高亮框里的公式。
下面是用 Plotly 绘制的交互式函数图像,你可以用鼠标悬停查看任意点的数值,或框选放大感兴趣的区域:
图像解读:
| 计算 | 含义 | |
|---|---|---|
| $0$ | 没有可改进部分,加速比为 $1$(无提升) | |
| $0.5$ | 可改进部分占一半,加速比不到 $2$ | |
| $0.556$ | 达到加速比 $2$ 的临界点(对应 5-1 第 (2) 问) | |
| $1.0$ | 全部可改进,加速比等于局部加速比 |
从图像(PPT 中的曲线)可以看出:
- 曲线呈上凸形状:在 较小时, 增长非常缓慢;只有当 接近 $1$ 时, 才会快速逼近 。
- 时,:即使你把系统一半的时间加速了 $10$ 倍,整体也只快了不到 $2$ 倍。
- 边际收益递减:每增加一点 ,带来的 提升越来越明显(曲线下凸转上凸的加速段),但在低 区域,投入产出的性价比极低。
工程启示:
PPT 的总结非常精准——“为使系统能获得较高性能加速比,性能可改进部分必须占有较大的比例;否则,增强该功能就没有多大意义。”
在实际系统优化中,这意味着:
- 不要优化只占运行时间 5% 的热点:即使你把这部分加速了 100 倍,全局加速比也只有约 $1.05$。
- 先 profiling,后优化:用性能分析工具找出真正的时间瓶颈(占比最大的部分),优先优化它。
- 并行化前的必修课:如果你要把代码并行化,必须先估算可并行部分的比例。如果串行部分占 ,那么无论用多少核,加速比都过不了 $3.33$。
通用公式速查
对于任意局部加速比 ,单部件阿姆达尔定律的变形公式如下:
| 已知条件 | 求解目标 | 公式 |
|---|---|---|
| 、 | ||
| 、 | ||
| 、 |
尤其建议记住反解 的公式:,这在考试中经常用来快速验证”要达到某加速比,至少需要改进多大比例”。
流水线吞吐、效率计算
相关PPT截图
题目: 设有一条 4 段流水线,各段执行时间依次为:
(1) 求连续输入 4 条指令和连续输入 40 条指令时,该流水线的实际吞吐率和效率。
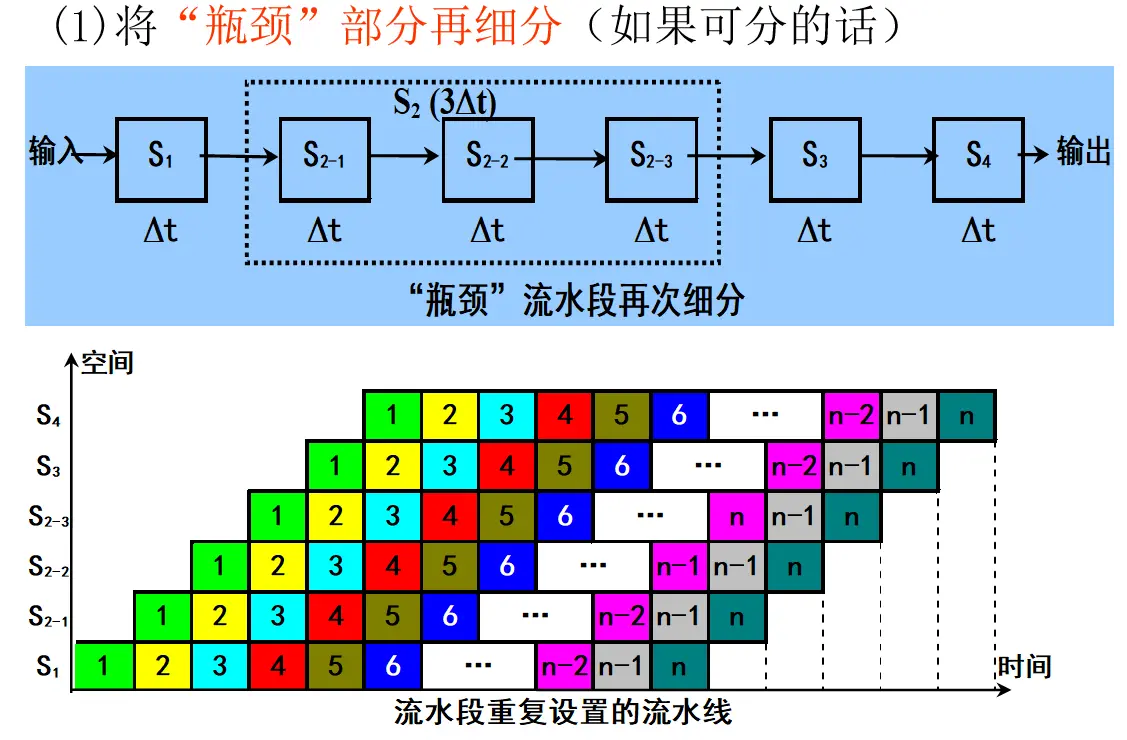
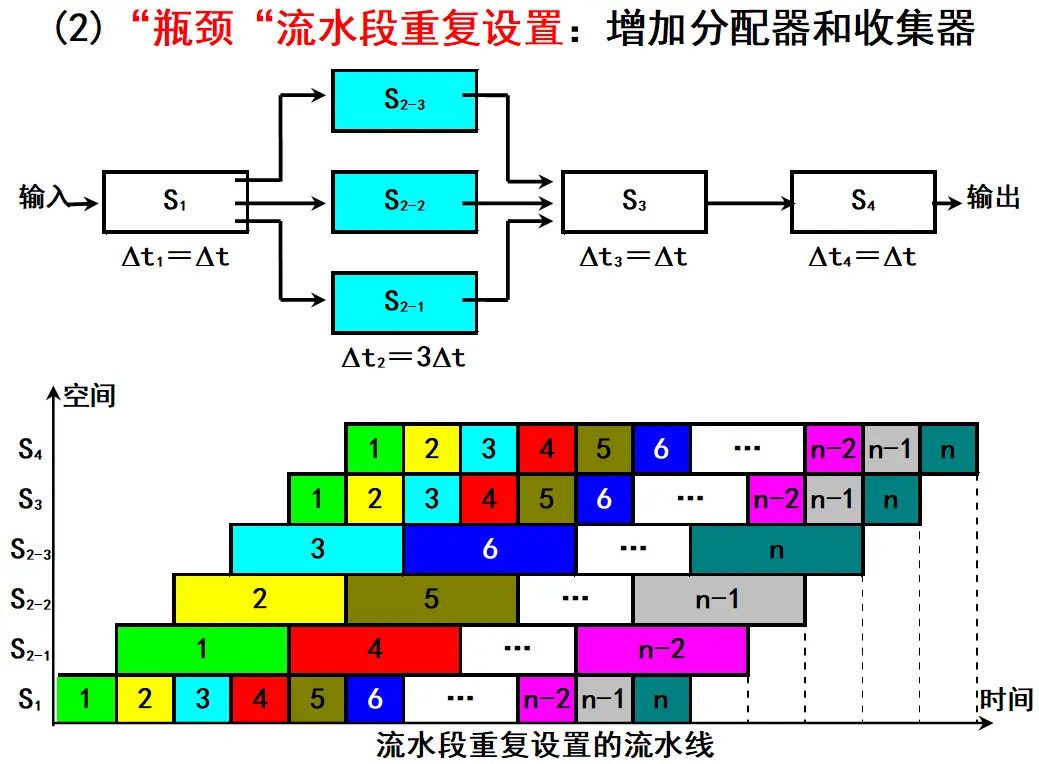
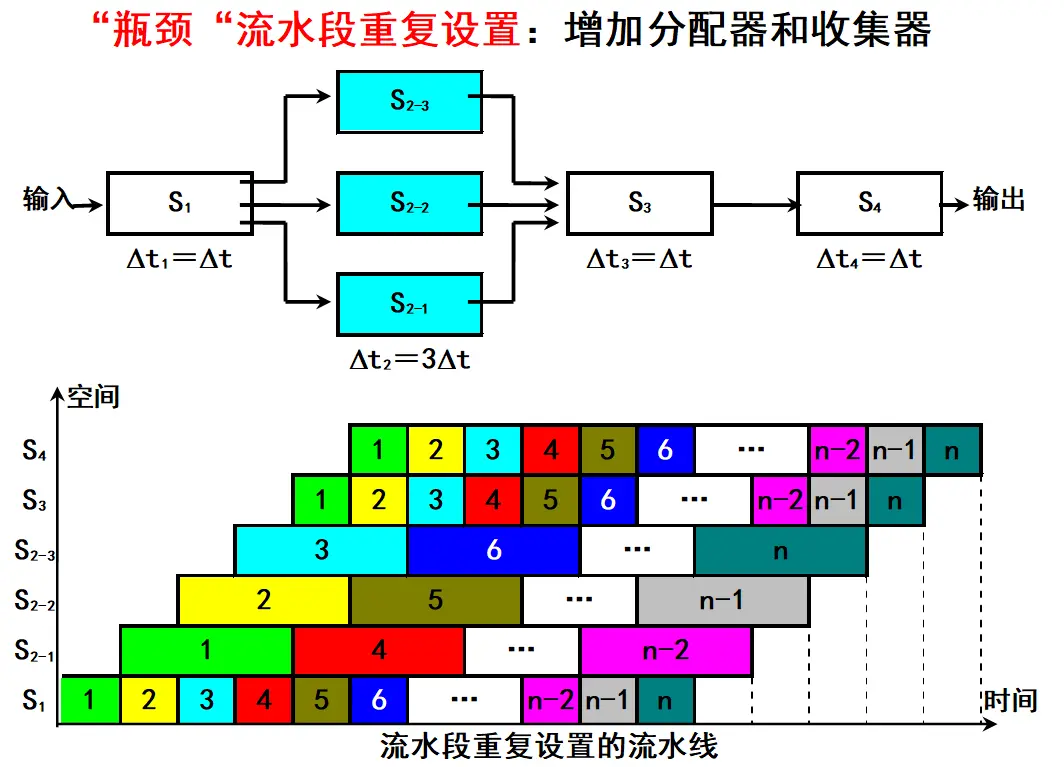
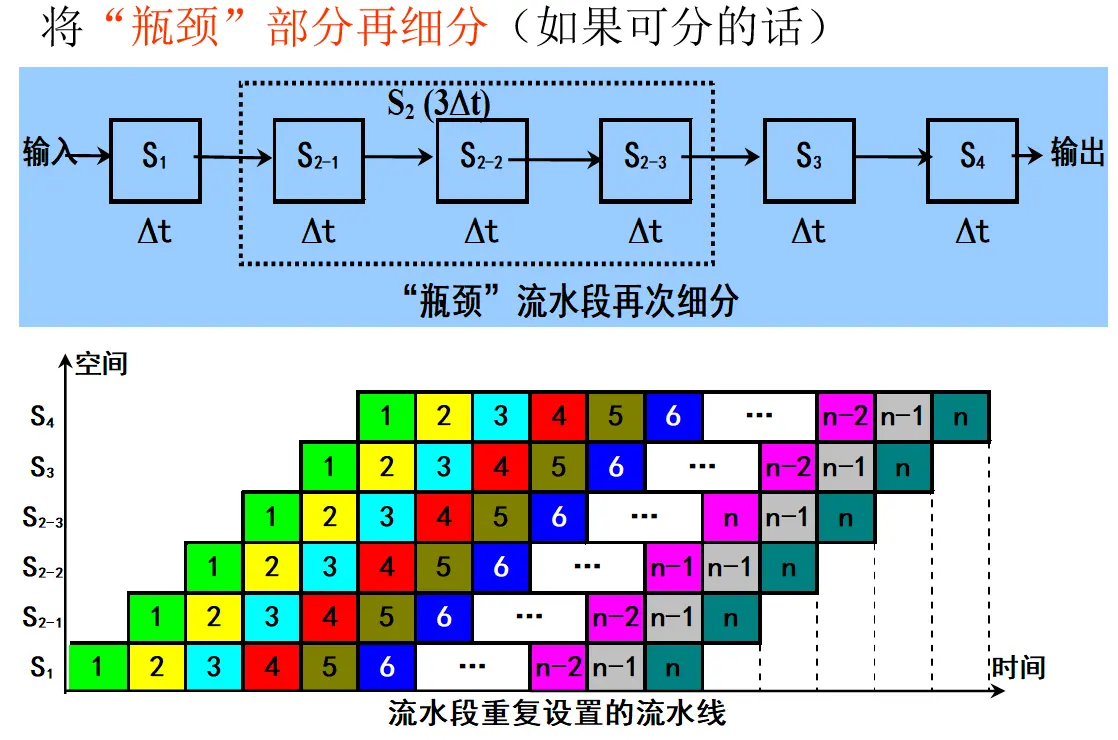
(2) 将瓶颈段分别细分为 2 和 3 个独立段,各子段执行时间均为 ,分别计算改进后的流水线连续输入 4 条指令和连续输入 40 条指令时的实际吞吐率和效率。
(3) 比较 (1) 和 (2) 的结果,给出结论。
解答:
这道题建议直接使用 PPT 中的符号体系来做,这样复习时能和课件、参考答案对应起来。
| 符号 | 含义 | 本题说明 |
|---|---|---|
| $K$ | 流水线段数 | 原始流水线 $K = 4$,细分后 $K’ = 7$ |
| $n$ | 连续输入的指令条数 | 本题分别取 $n = 4$ 和 $n = 40$ |
| 完成 $n$ 条指令所需的流水线总时间 | 用来计算实际吞吐率 | |
| $n$ 条指令在各流水段上的实际工作总时间 | 用来计算效率 | |
| $TP$ | 实际吞吐率 | 单位时间完成的指令条数 |
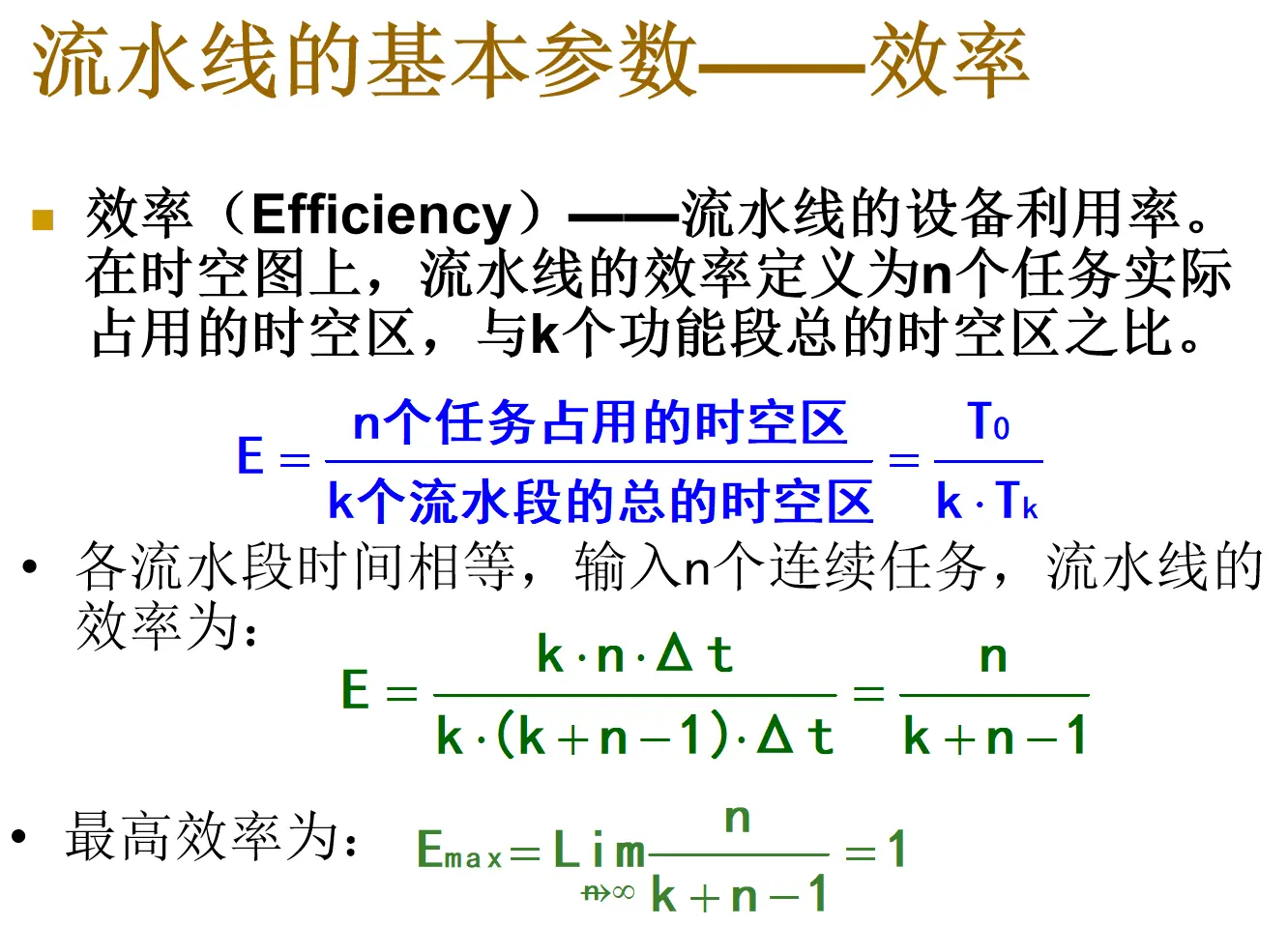
| $E$ | 流水线效率 | 流水线各段资源的平均利用率 |
PPT 中实际吞吐率的公式是:
流水线效率的公式是:
其中, 不是第一条指令的时间,而是 $n$ 条指令实际占用流水线各功能段的总工作量:
对于各段时间不完全相等的流水线, 要按“第一条指令通过全部流水段的时间 + 后续指令的输出间隔”来算:
其中 是最慢流水段的执行时间,也就是流水线稳定后的输出间隔。
PPT 截图第 (1) 问的计算思路是对的,但最后的部分数值存在笔误。比如按照它前面写出的总时间表达式,4 条指令应得到 ,效率应为 ,不是 。下面保留 PPT 的符号写法,但采用算式自洽的结果。
(1) 原始 4 段流水线
原始流水线各段执行时间为:
| 流水段 | 执行时间 |
|---|---|
| 第 1 段 | |
| 第 2 段 | |
| 第 3 段 | |
| 第 4 段 |
所以有:
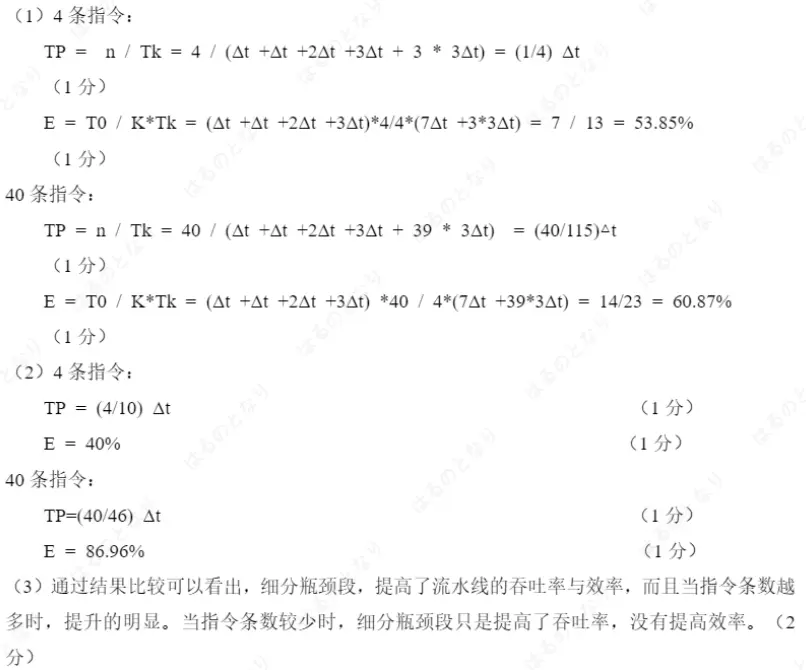
原始流水线:连续输入 4 条指令
先计算完成 4 条指令所需的总时间 :
实际吞吐率为:
接着计算效率。4 条指令的实际工作总量为:
流水线在总时间 内一共有 的可用资源,因此:
所以原始流水线连续输入 4 条指令时:
- 实际吞吐率:
- 效率:
原始流水线:连续输入 40 条指令
先计算完成 40 条指令所需的总时间 :
实际吞吐率为:
40 条指令的实际工作总量为:
效率为:
所以原始流水线连续输入 40 条指令时:
- 实际吞吐率:
- 效率:
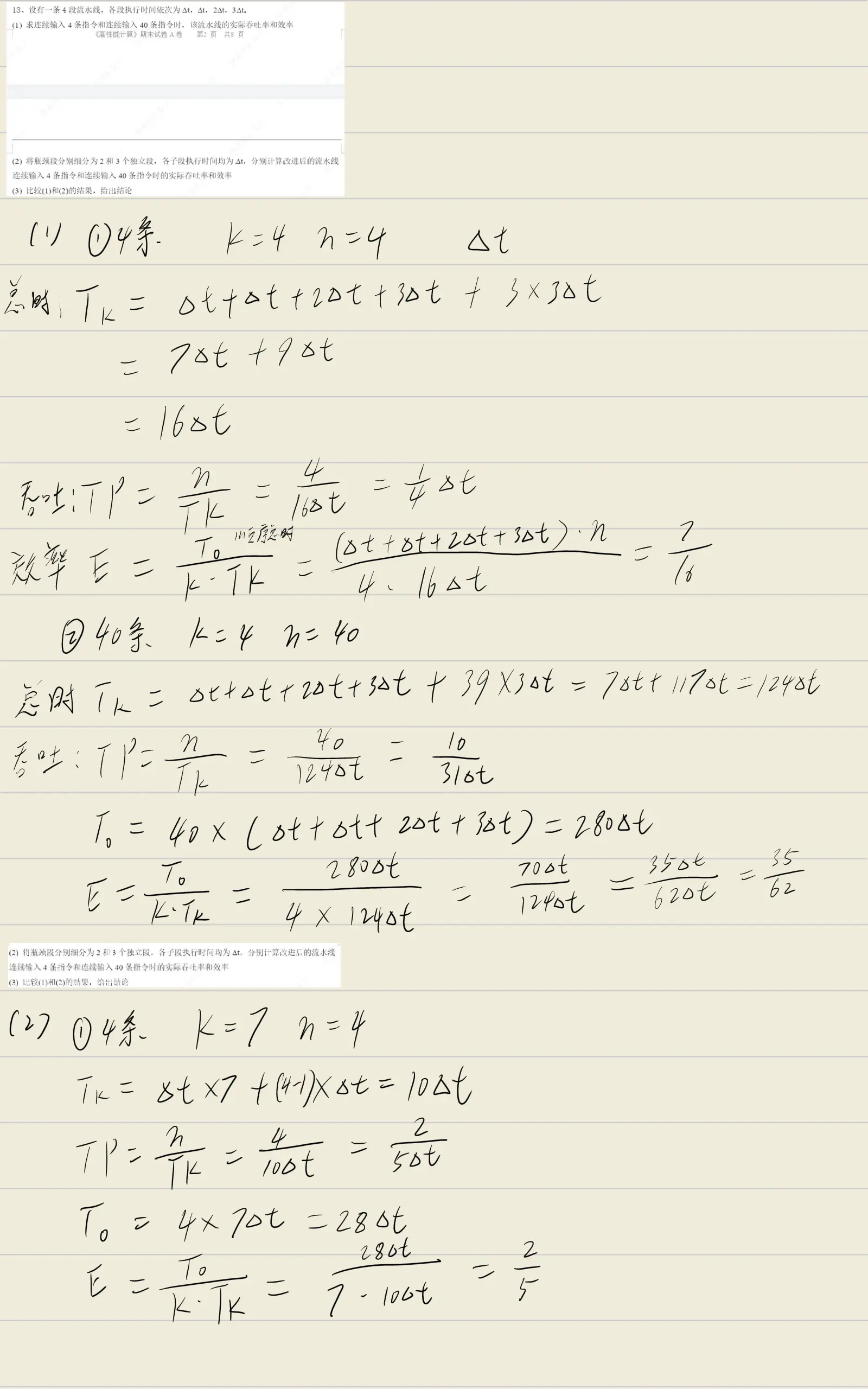
(2) 细分瓶颈段后的流水线
原流水线中,第 3 段为 ,第 4 段为 。题目要求把它们分别细分为 2 个和 3 个独立子段,且每个子段时间都为 。
因此,细分后的流水线段数为:
细分后每一段的执行时间都是 ,所以:
细分后流水线:连续输入 4 条指令
完成 4 条指令所需的总时间为:
实际吞吐率为:
4 条指令的实际工作总量仍为:
效率为:
所以细分后连续输入 4 条指令时:
- 实际吞吐率:
- 效率:
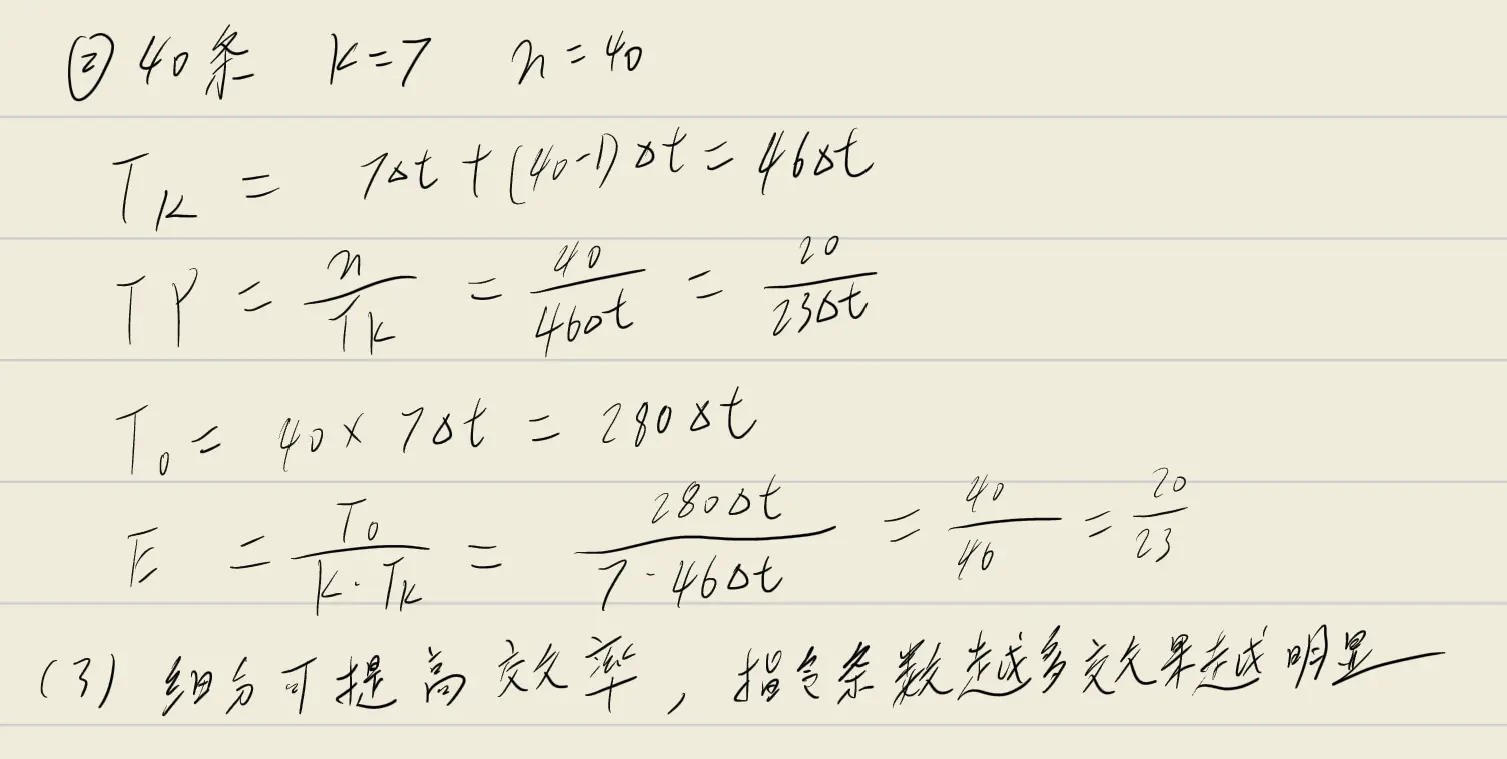
细分后流水线:连续输入 40 条指令
完成 40 条指令所需的总时间为:
实际吞吐率为:
40 条指令的实际工作总量仍为:
效率为:
所以细分后连续输入 40 条指令时:
- 实际吞吐率:
- 效率:
(3) 结果比较与结论
| 指令条数 | 流水线 | $TP$ | $E$ | |
|---|---|---|---|---|
| 4 | 原始流水线 | |||
| 4 | 细分后流水线 | |||
| 40 | 原始流水线 | |||
| 40 | 细分后流水线 |
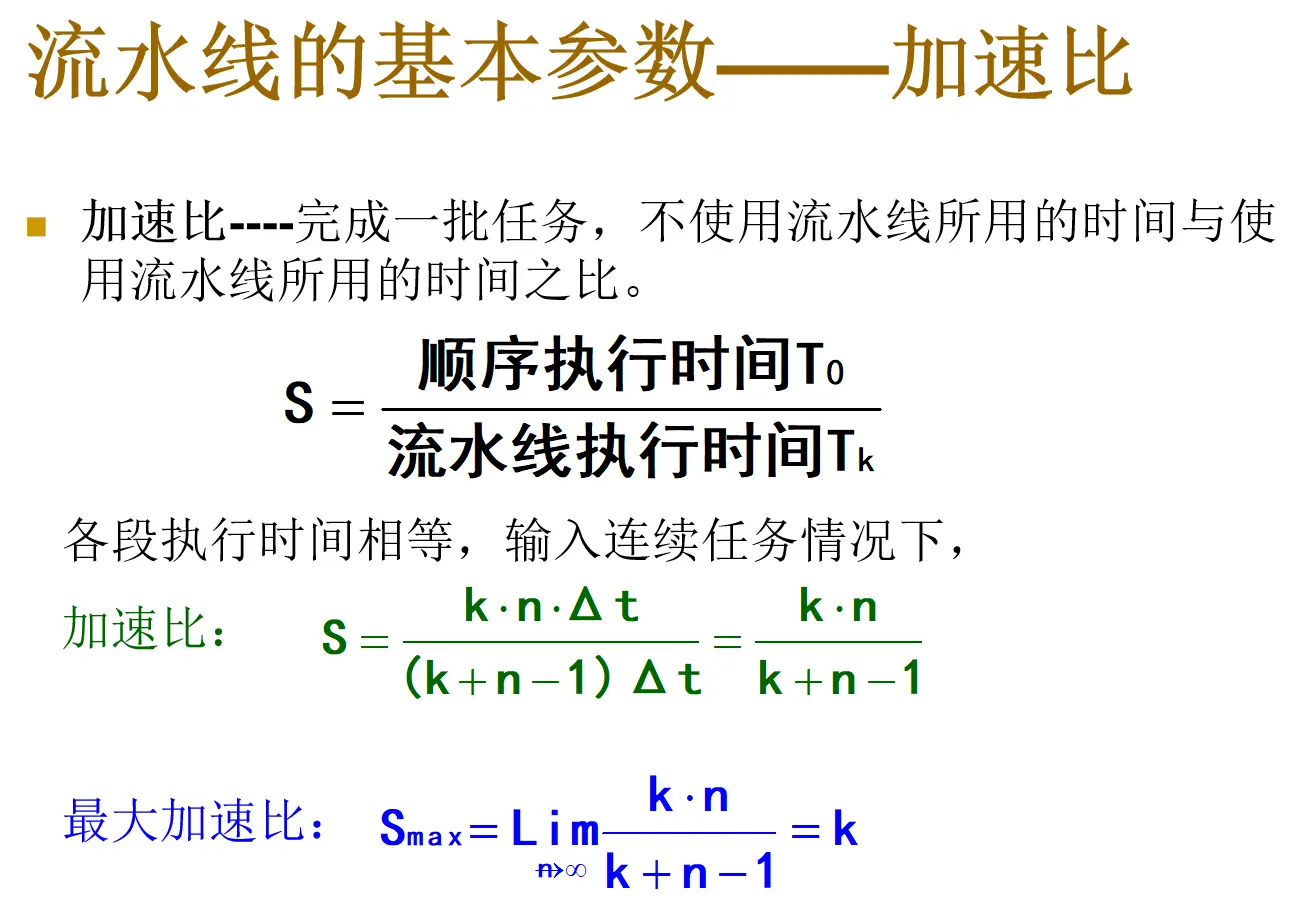
加速比 $S$ 计算:
这里要先区分两个容易混淆的指标。
流水线本身的加速比应定义为“顺序执行时间”与“流水执行时间”之比:
而“细分瓶颈段带来的相对改进倍数”应定义为原始流水线与细分后流水线完成同一批指令所需时间之比:
因此,$1.6$ 和 $2.70$ 表示的是细分瓶颈段后的相对改进倍数 $R$,不是流水线加速比 $S$ 本身。
连续输入 4 条指令时:
顺序执行时间为:
原始流水线的加速比为:
细分后流水线的加速比为:
细分瓶颈段带来的相对改进倍数为:
连续输入 40 条指令时:
顺序执行时间为:
原始流水线的加速比为:
细分后流水线的加速比为:
细分瓶颈段带来的相对改进倍数为:
汇总如下:
| 指令数 | 原始流水线加速比 | 细分后流水线加速比 | 相对改进倍数 $R$ | 效率变化 |
|---|---|---|---|---|
| $n=4$ | (下降) | |||
| $n=40$ | (上升) |
结论:
- 原始流水线的最慢段是 ,所以稳定输出间隔为 。
- 细分瓶颈段后,稳定输出间隔从 降为 ,因此实际吞吐率明显提高。
- 当指令条数较少时,细分后流水线段数从 4 段增加到 7 段,装入和排空开销占比较大,所以效率没有提高,反而从 降到 。
- 当指令条数较多时,装入和排空开销被摊薄,流水线更接近稳定工作状态,吞吐率和效率都会明显提高。
- 因此,细分瓶颈段可以提高流水线吞吐率;但只有当连续输入的指令条数足够多时,流水线效率才会明显提高。
流水线时空图绘制(动态多功能流水线)

题目: 一条动态多功能流水线由 5 个功能段组成(注:题干中”6个”为笔误)。其中:
- 乘法流水线:s1 → s3 → s4 → s5(使用4段)
- 加法流水线:s1 → s2 → s5(使用3段)
时间参数:
- 第 2 段(s2)时间为
- 其余各段时间均为
假设该流水线的输出结果可以直接返回输入端,且设置有足够的缓冲寄存器。以最快的方式用该流水线计算:
(1) 画出其处理过程的时空图;
(2) 计算其实际的吞吐率和效率。
解答:
前置知识:动态多功能流水线
在动手解题之前,先理解几个关键概念:
什么是动态多功能流水线?
动态多功能流水线是指在同一条流水线中,不同的操作可以使用不同的功能段组合。与静态流水线(同一时间只能执行一种操作)不同,动态流水线允许不同操作的功能段重叠使用,提高资源利用率。
本题中:
- 4次乘法:、、、
- 路径:s1 → s3 → s4 → s5(4段,每段)
- 3次加法:、、
- 路径:s1 → s2 → s5(3段,s2需要)
关键约束:
- s1 和 s5 是共享段,乘法与加法不能同时使用
- s2 是瓶颈段(),加法操作在此处需要2个时间单位
- 计算顺序必须满足数据依赖:先算4个乘法,再算加法
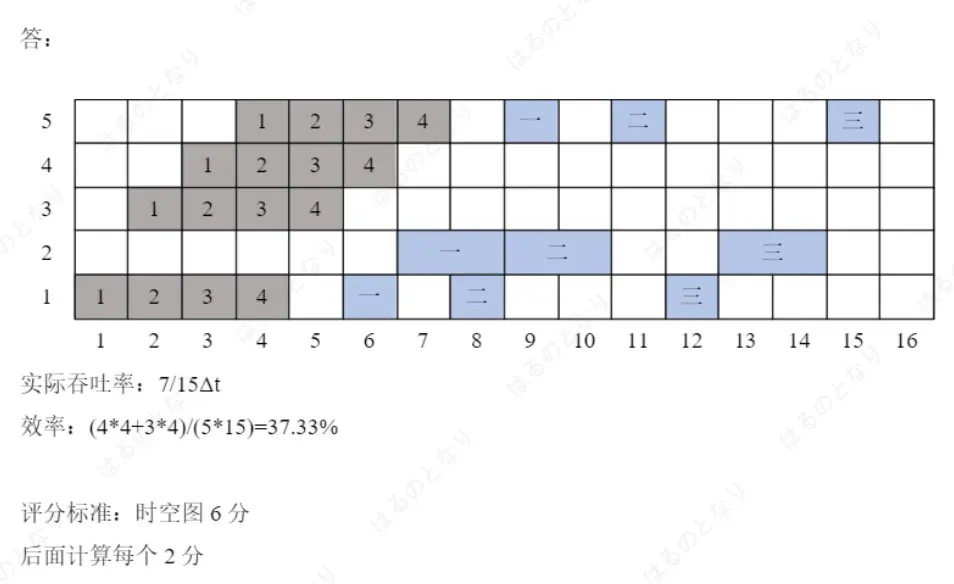
(1) 流水线时空图
首先明确各段时间参数(以为单位):
| 功能段 | 执行时间 | 乘法使用 | 加法使用 |
|---|---|---|---|
| s1 | ✓ | ✓(共享) | |
| s2 | ✗ | ✓(瓶颈) | |
| s3 | ✓ | ✗ | |
| s4 | ✓ | ✗ | |
| s5 | ✓ | ✓(共享) |
关于排序方向:官方答案采用从下往上的排序方式,即 s1 在最下方,s5 在最上方。
图中符号含义:
- 1, 2, 3, 4(灰色):4次乘法操作()
- →, 二, 三(蓝色):3次加法操作()
下面使用 HTML 绘制时空图(横轴为时间单位,每格):
| 功能段 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| s5 | 1 | 2 | 3 | 4 | 一 | 二 | 三 | ||||||||
| s4 | 1 | 2 | 3 | 4 | |||||||||||
| s3 | 1 | 2 | 3 | 4 | |||||||||||
| s2 () |
一 | 二 | 三 | ||||||||||||
| s1 | 1 | 2 | 3 | 4 | 一 | 二 | 三 | ||||||||
图:动态多功能流水线时空图(深灰=乘法 1-4,深蓝=加法 一二三)
时空图解读:
乘法阶段(时刻1-7):
- 4个乘法操作连续进入流水线,间隔
- 在时刻1-4完成,在时刻4-7完成
- s1和s5在乘法和加法之间切换使用
加法阶段(时刻6-15):
- 加法1(→):,时刻6进入s1,经过s2(7-8),时刻9到s5完成
- 加法2(二):,时刻8进入s1,经过s2(9-10),时刻11到s5完成
- 加法3(三):,必须在加法1和加法2都完成后才能开始
- 加法1结果在时刻9可用
- 加法2结果在时刻11可用
- 因此加法三最早时刻12才能进入s1,经过s2(13-14),时刻15到s5完成
关键数据依赖:加法三需要读取加法一和加法二的结果。
- 如果加法三在时刻11启动,此时加法二还在s2执行(时刻9-10),结果尚未写入
- 正确做法是等待时刻12,确保加法二的结果已在时刻11写入
- 总执行时间:
(2) 计算实际吞吐率和效率
任务总数:4次乘法 + 3次加法 = 7个任务
计算实际吞吐率 $TP$:
吞吐率定义为单位时间完成的任务数:
代入 :
计算效率 $E$:
效率是实际使用时间与总可用时间的比值:
- 乘法任务:4个任务 × 4段 = 16段·
- 加法任务:3个任务 × 3段 = 9段·
- 但s2段每个加法占用,所以实际为 或按公式 (每个任务按4段计算基准)
官方答案给出的计算方式:
分子解释: 表示4个乘法任务各用4段; 表示3个加法任务按4段折算(实际用3段,但s2占2折算后等效为4段)
答案:
| 指标 | 结果 |
|---|---|
| 实际吞吐率 | M任务/秒 |
| 效率 | |
| 总执行时间 |
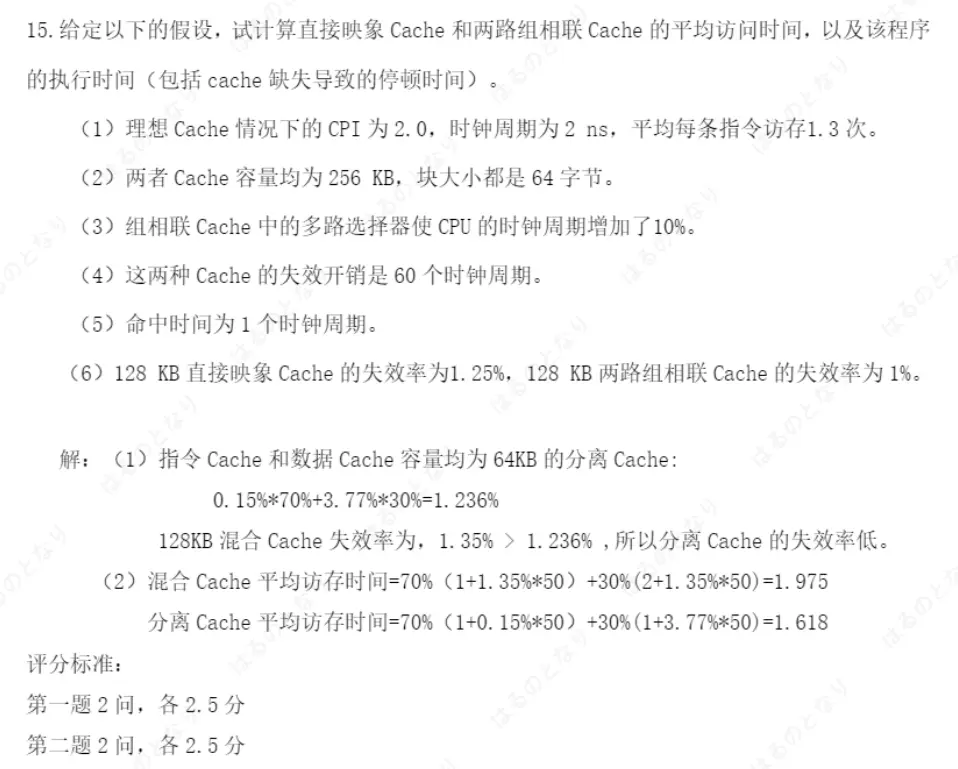
直接映像 Cache 与两路组相联 Cache 性能分析
相关ppt
PPT中类似例题
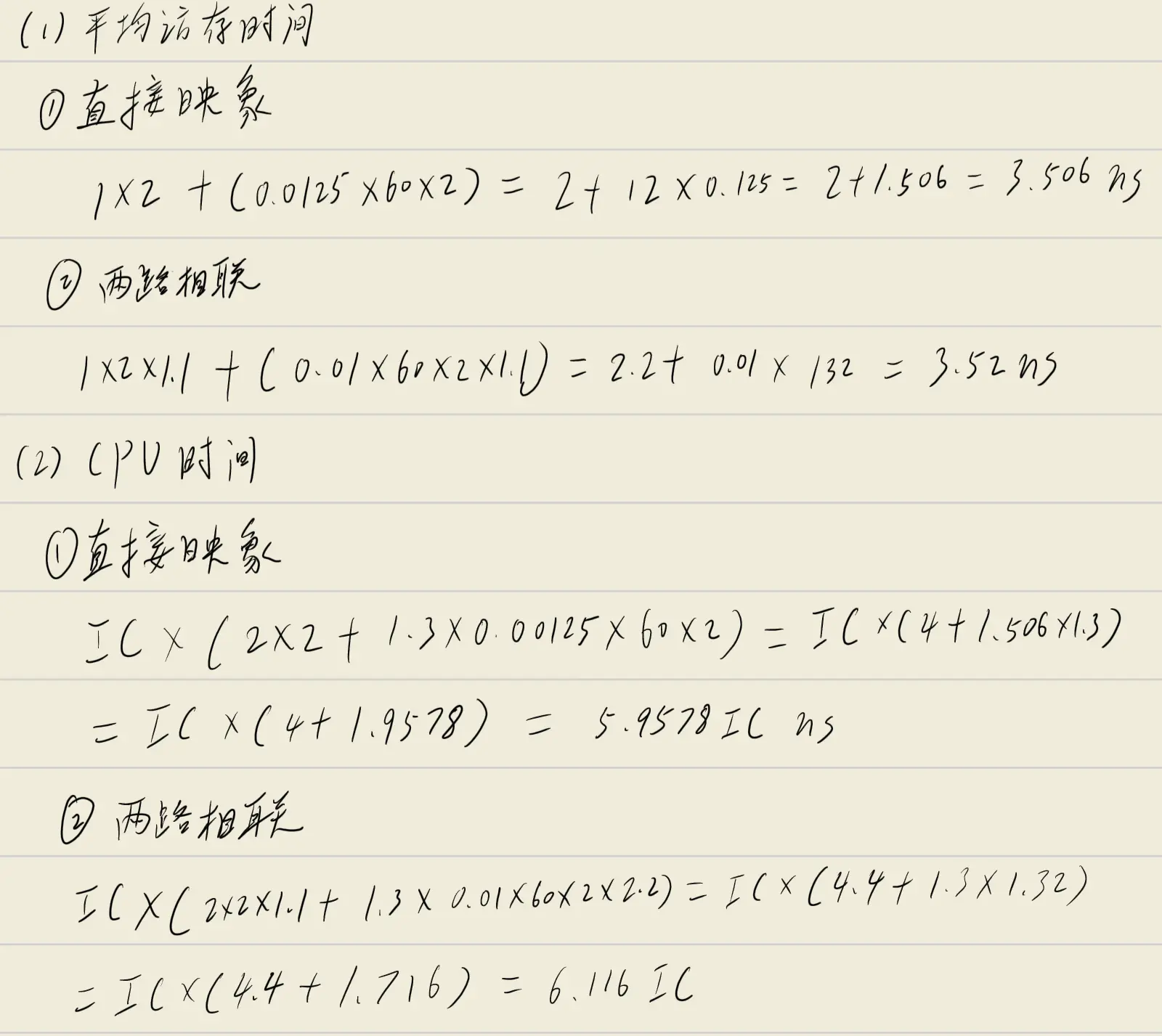
题目: 给定以下的假设,试计算直接映像 Cache 和两路组相联 Cache 的平均访问时间,以及该程序的执行时间(包括 cache 缺失导致的停顿时间)。
已知条件:
| 条件 | 内容 |
|---|---|
| (1) 理想 CPI | 理想 Cache 情况下的 CPI 为 $2.0$ |
| (2) 时钟周期 | (直接映像);组相联因多路选择器增加 |
| (3) 访存次数 | 平均每条指令访存 $1.3$ 次 |
| (4) Cache 容量 | 两者均为 ,块大小 |
| (5) 命中时间 | $1$ 个时钟周期 |
| (6) 失效开销 | $60$ 个时钟周期 |
| (7) 失效率 | 直接映像为 ; 两路组相联为 |
解答:
这道题要求分别计算直接映像 Cache 和两路组相联 Cache 的平均访存时间和程序执行时间(包含 Cache 缺失导致的存储器停顿)。下面严格依据题目给出的 6 个条件逐步求解,不引入其他例题的数据或比例。
关于失效率:题目条件 (2) 给出 Cache 容量为 ,条件 (6) 给出的失效率标注为 “ Cache”。由于题目仅提供了这组失效率数据,以下计算直接采用题目给定数值(直接映像 、两路组相联 ),不再做额外换算。
前置知识:核心公式
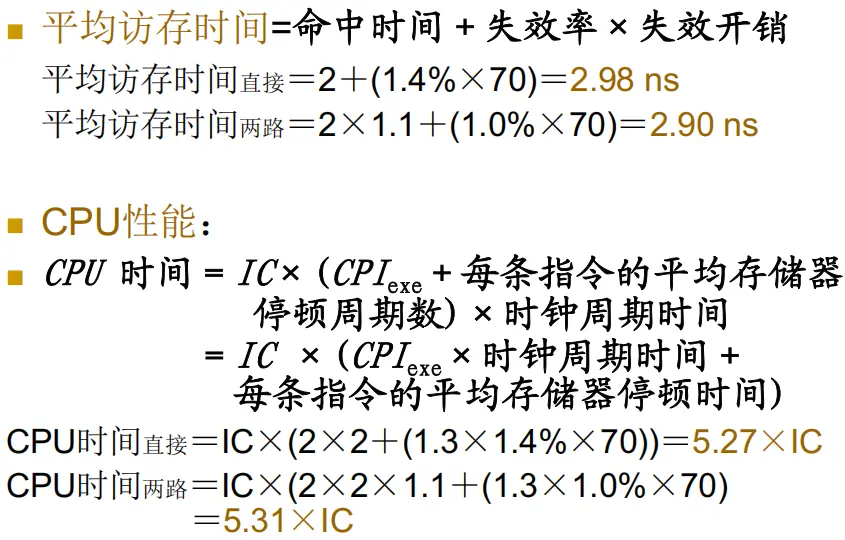
1. 平均访存时间
2. CPU 时间(含存储器停顿)
等价展开为:
其中:
- $IC$:程序执行的指令条数
- :理想 Cache 情况下每条指令的执行时钟周期数
- 每条指令的平均存储器停顿周期数 $=$ 访存次数/指令 失效率 失效开销(周期数)
直接映像 Cache 计算
基本参数:
| 参数 | 数值 |
|---|---|
| 时钟周期时间 | |
| 命中时间 | |
| 失效开销 | |
| 失效率 | |
| $2.0$ | |
| 访存次数/指令 | $1.3$ |
(1) 平均访存时间
(2) CPU 时间
每条指令的平均存储器停顿时间:
总 CPU 时间(用展开形式,理想执行时间 + 停顿时间):
两路组相联 Cache 计算
条件 (3) 指出,组相联的多路选择器使 CPU 时钟周期增加 :
基本参数:
| 参数 | 数值 |
|---|---|
| 时钟周期时间 | |
| 命中时间 | |
| 失效开销 | |
| 失效率 | |
| $2.0$ | |
| 访存次数/指令 | $1.3$ |
(1) 平均访存时间
(2) CPU 时间
每条指令的平均存储器停顿时间:
总 CPU 时间:
结果汇总
| 性能指标 | 直接映像 Cache | 两路组相联 Cache |
|---|---|---|
| 时钟周期时间 | ||
| 失效率 | ||
| 平均访存时间 | ||
| CPU 时间(每指令) |
结论
- 平均访存时间:直接映像 Cache 略优于两路组相联()。组相联虽然失效率更低(),但多路选择器使时钟周期增加 ,命中时间从 上升到 ,这部分开销几乎抵消了失效率降低带来的收益。
- CPU 时间:直接映像 Cache 更优()。虽然组相联减少了存储器停顿时间(),但理想执行时间因时钟周期变长而增加(),且理想执行时间的增量()大于停顿时间的减少量(),最终导致总执行时间反而增加。
总结:在本题的参数设定下,直接映像 Cache 在平均访存时间和 CPU 执行时间两个指标上均优于两路组相联 Cache。这说明降低失效率并不一定能带来整体性能提升,时钟周期的增加同样是必须考虑的关键因素。
分析设计题
存储系统综合题
相关ppt




题目:
存储是计算机系统中必不可少的组成部分,存储器是”冯诺依曼”型计算机的五大组成部件之一。我们常用到寄存器、Cache、内存、磁盘、Flash、SSD 硬盘、光盘等不同存储介质,它们有着截然不同的特点。
(1) 请在性能、容量/集成度、价格三个方面分析以上不同存储介质(按高、中、低进行定性分析,几种存储介质相对比较),并标明其易失性和属性(电子设备/机械设备)。
(2) 请根据自己的理解,介绍单机存储系统整体结构,分析其要解决的问题、设计的基本思路、依托的基本原理以及最终的效果。
(3) RAID 技术经常用于商业存储系统,请从性能、容量、可靠性等几个角度分析 RAID 技术。
解答:
这道题是一道典型的”存储系统综合论述题”,涵盖存储介质的物理特性、存储层次结构的设计思想、以及磁盘阵列技术三个层面。下面逐一展开分析。
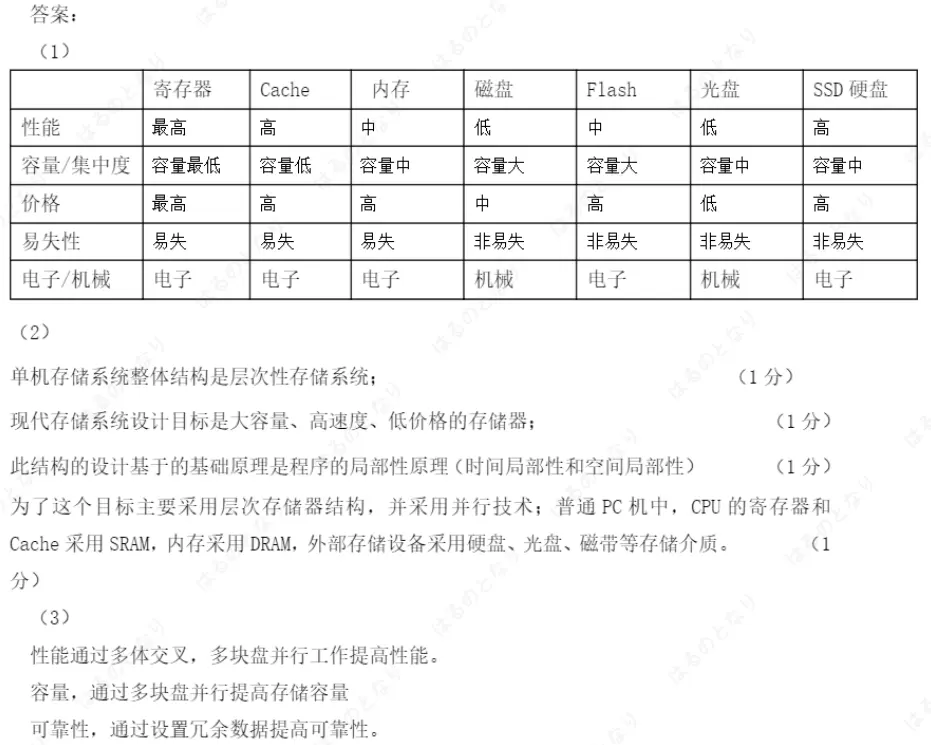
(1) 不同存储介质的特性比较
首先,按照题目要求,将七种存储介质在五个维度上进行定性比较:
| 存储介质 | 性能 | 容量/集成度 | 价格 | 易失性 | 电子/机械 |
|---|---|---|---|---|---|
| 寄存器 | 最高 | 容量最低 | 最高 | 易失 | 电子 |
| Cache | 高 | 容量低 | 高 | 易失 | 电子 |
| 内存(主存) | 中 | 容量中 | 高 | 易失 | 电子 |
| 磁盘(HDD) | 低 | 容量大 | 中 | 非易失 | 机械 |
| Flash | 中 | 容量大 | 高 | 非易失 | 电子 |
| 光盘 | 低 | 容量中 | 低 | 非易失 | 机械 |
| SSD 硬盘 | 高 | 容量中 | 高 | 非易失 | 电子 |
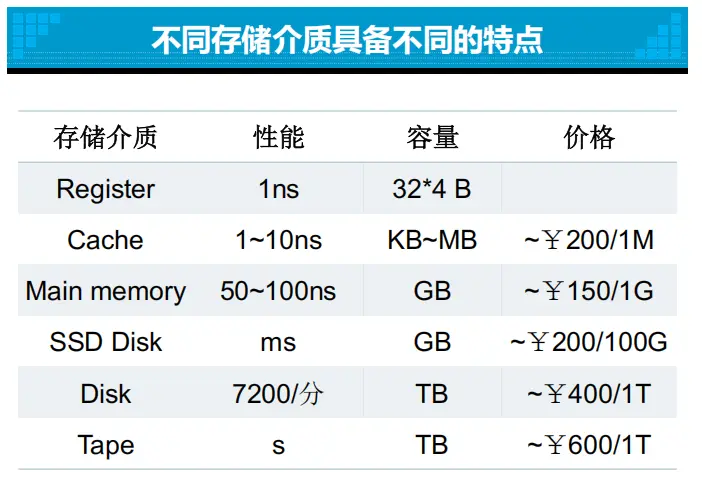
上述定性结论与课程 PPT 中的定量数据(PPT 79)一致,PPT 中给出的典型数值参考如下:
存储介质 典型访问时间 典型容量 参考价格 Register — Cache ¥200/1M Main Memory ¥150/1G SSD Disk 级 ¥200/100G Disk (HDD) ¥400/1T Tape 级 ¥600/1T 从定量数据可以直观感受到存储层次的速度梯度:寄存器(ns) → Cache(ns) → 内存(ns~百ns) → SSD(ms) → 磁盘(ms~机械延迟) → 磁带(s)。
知识点深入讲解:
为什么寄存器最快、最贵、容量最小?
寄存器位于 CPU 内部,与运算单元直接相连,不需要经过任何总线或外部电路,因此访问延迟极低(通常只有几个皮秒到纳秒级)。但每一个寄存器都需要独立的晶体管来存储一位数据,且为了保证速度,使用的是与 CPU 核心相同的先进工艺制造,导致单位存储成本极高。在芯片面积有限的情况下,寄存器数量被严格限制(现代 x86 处理器通常只有几十到一百多个通用寄存器)。
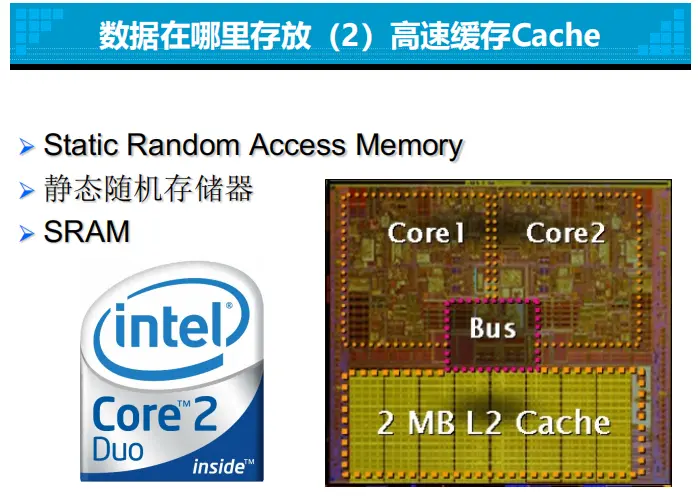
Cache 与内存:SRAM vs DRAM
课程 PPT(PPT 69、70)中明确指出:
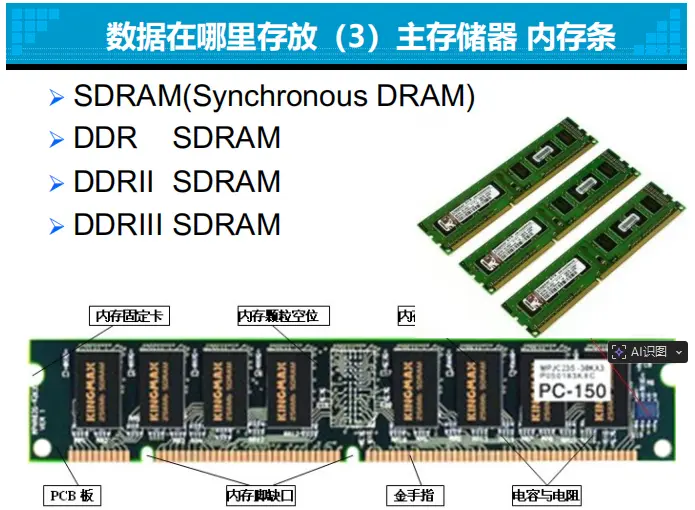
- Cache 的物理实现是 SRAM(Static Random Access Memory,静态随机存储器)
- 内存(主存)的物理实现是 DRAM(Dynamic Random Access Memory,动态随机存储器),包括 SDRAM、DDR、DDRII、DDRIII 等类型
两者的核心差异:
| 特性 | Cache(SRAM) | 内存(DRAM) |
|---|---|---|
| 存储单元 | 六晶体管(6T) | 单晶体管 + 电容(1T1C) |
| 是否需要刷新 | 不需要 | 需要定期刷新(电容漏电) |
| 读写速度 | 快() | 较慢() |
| 集成度 | 低 | 高 |
| 功耗 | 高 | 低 |
| 成本 | 高 | 低 |
| 典型容量 |
因此,SRAM 适合做小容量高速缓存(KB 到 MB 级别),DRAM 可以做成大容量主存(GB 级别)。PPT 69 中以 Intel Core 2 Duo 为例展示了芯片上的 L2 Cache 布局。
Flash 与 SSD:NAND 闪存的特性
课程 PPT(PPT 72、73)中展示了 Flash 的各种形态(SD 卡、U 盘、存储卡等),以及 SSD 硬盘与 HDD 的物理对比。PPT 73 中对 SSD 的定义简洁准确:
SSD(Solid State Disk)俗称固态硬盘,相对原来主轴旋转,并无机械部分,所以被人称为固态硬盘。
Flash 存储器属于非易失性半导体存储,基于浮栅晶体管存储电荷。它没有机械结构,抗震性好,但存在两个关键限制:
- 写入前必须先擦除(以块为单位),因此写入速度通常慢于读取速度。
- 擦写次数有限(通常每个块几万到几十万次),需要磨损均衡(Wear Leveling)算法来延长寿命。
SSD(固态硬盘)本质上就是由多块 NAND Flash 芯片 + 主控芯片 + 缓存(DRAM)组成的存储设备。它的性能远高于传统机械硬盘,但单位容量价格仍高于 HDD。
磁盘(HDD)与光盘:机械存储的本质瓶颈
- 磁盘:通过磁头在旋转盘片上的机械运动来读写数据。即使转速高达 7200 RPM 或 10000 RPM,磁头的寻道时间(Seek Time)和旋转延迟(Rotational Latency)也决定了它的访问延迟在毫秒级(约 5–10 ms),比半导体存储慢 到 倍。
- 光盘(CD/DVD/BD):通过激光头读取盘片上的凹凸坑来存储信息,同样需要机械寻道,且转速受限于光盘材质,访问速度比硬盘更慢。
易失性与非易失性的核心区别
课程 PPT(PPT 71)中从原理上区分了两类存储器:
- RAM(Random Access Memory,随机存取存储器):存储的内容可通过指令随机读写访问,RAM 中的数据在掉电时会丢失,因而只能在开机运行时存储数据。包括 SRAM(用于 Cache)和 DRAM(用于主存)。
- ROM(Read Only Memory,只读存储器):只能从中读取信息而不能任意写信息,掉电后数据可保持不变,多用于存放一次性写入的程序或数据(如 BIOS)。包括 ROM、PROM、EPROM、EEPROM 等类型。
题目中的七种介质分类:
- 易失性:寄存器、Cache、内存(都属于 RAM)
- 非易失性:磁盘、Flash、SSD、光盘(属于 ROM/磁存储/光存储范畴)
从物理机制上看:易失性存储依赖持续供电来维持数据;非易失性存储通过磁化方向(磁盘)、浮栅电荷(Flash/SSD)或物理凹凸(光盘)来保存数据,断电后仍能长期保持。
课程 PPT(PPT 76、77)还提到了磁带和软盘这两种传统存储介质,它们同样属于非易失性、机械式存储,但因容量小、速度慢,目前已基本被磁盘和 SSD 取代。
(2) 单机存储系统整体结构
核心答案:
现代单机存储系统的整体结构是层次性存储系统(Memory Hierarchy)。其设计目标是:在有限的成本下,为用户提供大容量、高速度、低价格的存储器。
| 要素 | 内容 |
|---|---|
| 要解决的问题 | 用户对存储器的需求存在矛盾:希望容量大、速度快、价格低,但单一存储介质无法同时满足这三点。 |
| 基本思路 | 采用层次化结构,将不同速度、容量、成本的存储介质组织成多级层次,让最常用的数据存放在最快、最贵的存储器中,不常用的数据存放在慢速、便宜的存储器中。 |
| 基本原理 | 程序的局部性原理,包括时间局部性(最近被访问的数据很可能再次被访问)和空间局部性(与最近被访问数据相邻的数据很可能被访问)。 |
| 最终效果 | 从用户角度看,系统呈现出的性能接近最快的存储器(Cache),容量接近最大的存储器(磁盘),而平均成本接近最便宜的存储器。 |
知识点深入讲解:
层次化存储结构的具体组成
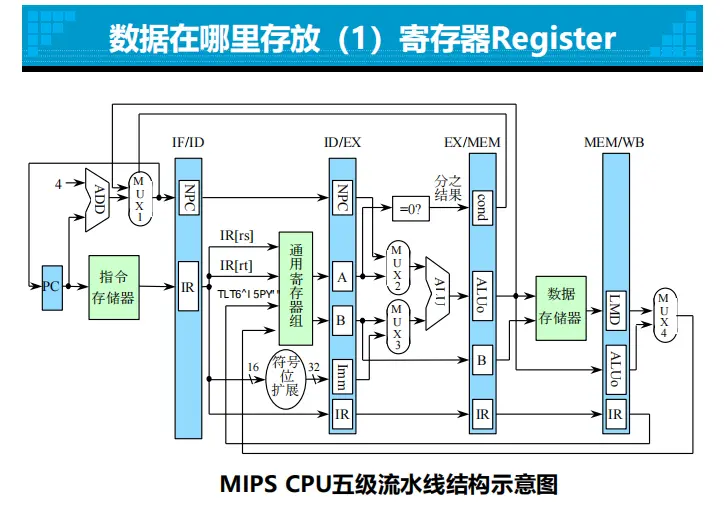
典型 PC 机的存储层次从上到下依次为:
1 | 寄存器 → Cache(L1/L2/L3)→ 主存(DRAM)→ 外存(SSD/HDD/光盘) |
- L1 Cache:分为指令 Cache 和数据 Cache,与 CPU 核心同频运行,延迟最低(约 1–4 个时钟周期)。
- L2/L3 Cache:容量逐级增大,延迟逐级增加,L3 通常被多个核心共享。
- 主存:通过 DDR 总线与 CPU 连接,延迟约几十到上百纳秒。
- 外存:通过 SATA/NVMe/PCIe 等接口连接,SSD 延迟约几十微秒,HDD 延迟约几毫秒。
局部性原理的量化意义
正是因为程序具有良好的局部性,Cache 才能以较小的容量(通常只有主存的千分之一到百分之一)获得 以上的命中率。如果程序完全随机访问内存,Cache 将毫无作用,层次化结构也就失去了意义。
并行技术的应用
现代存储系统除了层次化,还大量采用并行技术来提升性能:
- 多体交叉存储器:主存分为多个存储体,轮流响应 CPU 请求,提高带宽。
- SSD 内部并行:SSD 主控可以同时向多块 Flash 芯片发起读写请求。
- 磁盘 RAID:多块磁盘并行工作(见第 (3) 问)。
(3) RAID 技术分析
RAID(Redundant Array of Independent Disks,独立磁盘冗余阵列)是一种将多块物理磁盘组合成一个逻辑单元的技术,广泛应用于服务器和商业存储系统。
从题目要求的三个角度分析如下:
| 维度 | RAID 技术的作用 |
|---|---|
| 性能 | 通过数据条带化(Striping)将数据分散存储在多块磁盘上,实现多盘并行读写,大幅提升 I/O 带宽和吞吐量。 |
| 容量 | 多块磁盘的容量可以聚合为一个大容量的逻辑卷。例如,$N$ 块容量为 $C$ 的磁盘组成 RAID 0,总可用容量为 。 |
| 可靠性 | 通过数据冗余(镜像或校验码)来容忍磁盘故障。当某块磁盘损坏时,系统可以依靠冗余数据重建丢失的信息,保证业务不中断。 |
知识点深入讲解:
常见 RAID 级别及其权衡
| RAID 级别 | 核心机制 | 最少磁盘数 | 可用容量 | 容错能力 | 读性能 | 写性能 |
|---|---|---|---|---|---|---|
| RAID 0 | 条带化,无冗余 | 2 | 无(任何一盘坏则全丢) | 高 | 高 | |
| RAID 1 | 镜像(每份数据存两份) | 2 | 可坏 1 块 | 高 | 中 | |
| RAID 5 | 条带化 + 分布式奇偶校验 | 3 | 可坏 1 块 | 高 | 中(需计算校验) | |
| RAID 6 | 条带化 + 双分布式奇偶校验 | 4 | 可坏 2 块 | 高 | 较低(双校验计算) | |
| RAID 10 | RAID 1 + RAID 0 组合 | 4 | 每组镜像可坏 1 块 | 很高 | 高 |
RAID 5 的奇偶校验原理
假设有 4 块数据盘和 1 块校验盘,每块盘存储一个数据块。校验信息 $P$ 通过对同一条带上的数据块做异或(XOR)运算得到:
如果磁盘 损坏,可以通过剩余数据重建:
RAID 5 将校验块均匀分布在所有磁盘上,避免了单一校验盘成为瓶颈(RAID 4 的问题)。
为什么 RAID 是商业存储的标配?
- 单块磁盘的故障率不可忽略:企业级硬盘的年故障率(AFR)通常在 –,100 块盘组成的存储系统几乎每年都会有盘损坏。
- 热插拔 + 在线重建:RAID 配合热备盘(Hot Spare)可以在不中断服务的情况下自动重建数据。
- 性价比最优:RAID 5/6 以牺牲少量容量($1/N$ 或 $2/N$)为代价换取容错能力,比全盘镜像(RAID 1)成本更低。
总结:RAID 的本质是用多块廉价磁盘 + 冗余算法,在性能、容量、可靠性三个维度上取得平衡,是构建大规模、高可用存储系统的核心基石。
流水线冲突分析
相关PPT
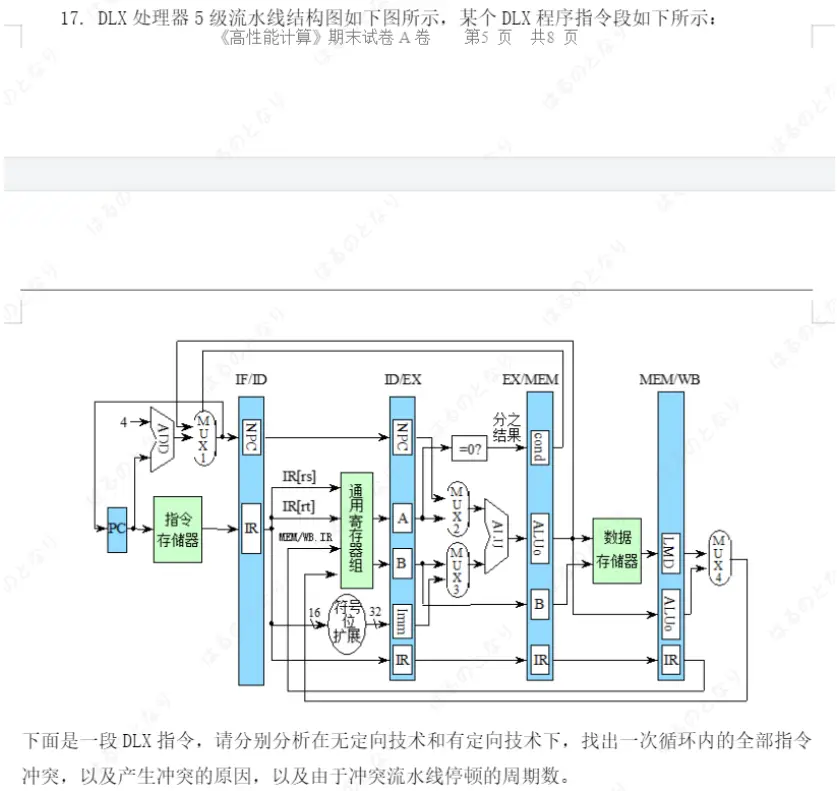
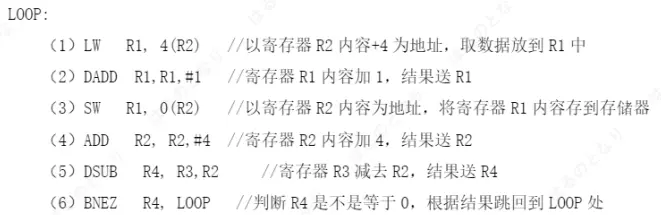
题目: 下面是一段DLX指令,请分别分析在无定向技术和有定向技术下,找出一次循环内的全部指令冲突,以及产生冲突的原因,以及由于冲突流水线停顿的周期数。
| 序号 | 指令 | 注释 |
|---|---|---|
| (1) | LW R1, 4(R2) |
以寄存器R2内容+4为地址,取数据放到R1中 |
| (2) | DADD R1, R1, #1 |
寄存器R1内容加1,结果送R1 |
| (3) | SW R1, 0(R2) |
以寄存器R2内容为地址,将寄存器R1内容存到存储器 |
| (4) | ADD R2, R2, #4 |
寄存器R2内容加4,结果送R2 |
| (5) | DSUB R4, R3, R2 |
寄存器R3减去R2,结果送R4 |
| (6) | BNEZ R4, LOOP |
判断R4是不是等于0,根据结果跳回到LOOP处 |
解答:
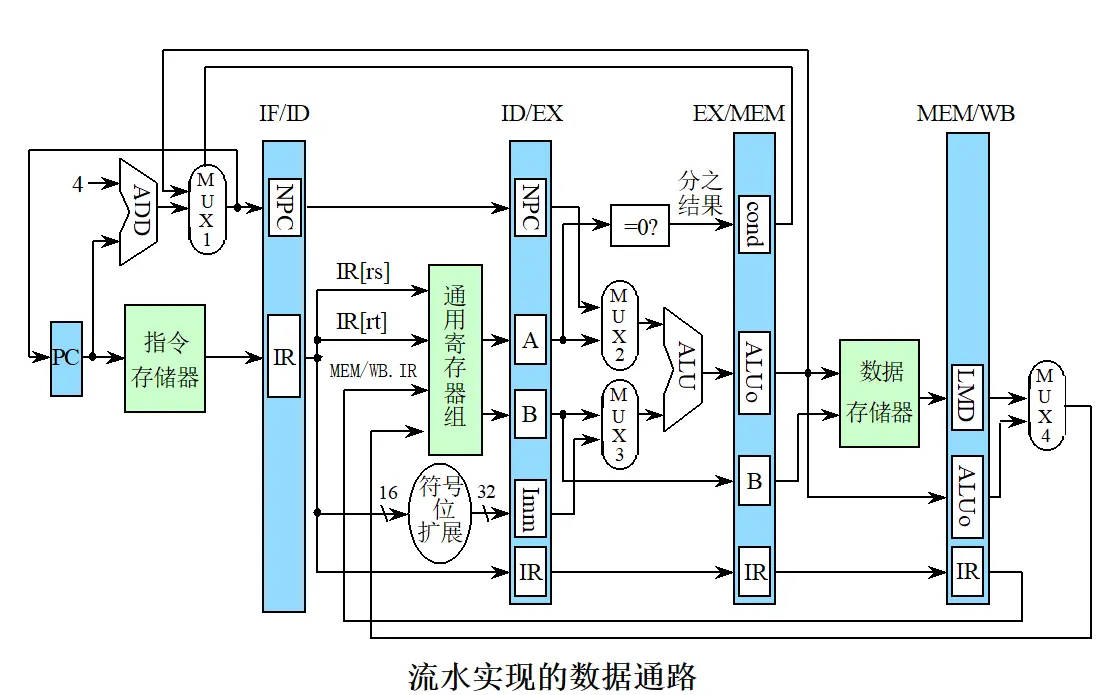
在分析之前,先回顾DLX 5级流水线的基本结构:IF(取指)→ ID(译码/读寄存器)→ EX(执行/有效地址计算)→ MEM(访存)→ WB(写回)。
第一步:识别一次循环内的全部指令冲突
一次循环内的6条指令之间存在以下数据相关和控制冲突:
| 序号 | 相关指令 | 冲突类型 | 相关寄存器 | 产生冲突的原因 |
|---|---|---|---|---|
| 1 | (1) → (2) | RAW | R1 | (1) LW指令在MEM段从存储器读取数据,在WB段才将结果写入R1;(2) DADD指令在ID段就需要从寄存器堆读取R1,供EX段ALU运算使用。 |
| 2 | (2) → (3) | RAW | R1 | (2) DADD指令在EX段完成加法运算,在WB段才将结果写入R1;(3) SW指令在ID段需要读取R1作为待存储的数据(store data),在MEM段写入存储器。 |
| 3 | (4) → (5) | RAW | R2 | (4) ADD指令在EX段完成加法运算,在WB段才将结果写入R2;(5) DSUB指令在ID段需要读取R2,供EX段ALU运算使用。 |
| 4 | (5) → (6) | RAW | R4 | (5) DSUB指令在EX段完成减法运算,在WB段才将结果写入R4;(6) BNEZ指令在ID段需要读取R4进行“是否等于0”的判断,以决定是否跳转。 |
| 5 | (6) | 控制冲突 | — | (6) BNEZ为条件分支指令,会改变程序的执行顺序(跳回LOOP)。流水线在分支判断完成前已经按顺序取了下一条指令,导致流水线中可能引入无效指令。 |
说明:上述冲突均为写后读(RAW, Read After Write)数据相关。在按序执行的DLX 5级流水线中,WAR(读后写)和WAW(写后写)冲突不会发生,因为指令按程序顺序进入流水线,且寄存器写回也按顺序进行。
第二步:无定向技术下的冲突分析与停顿周期
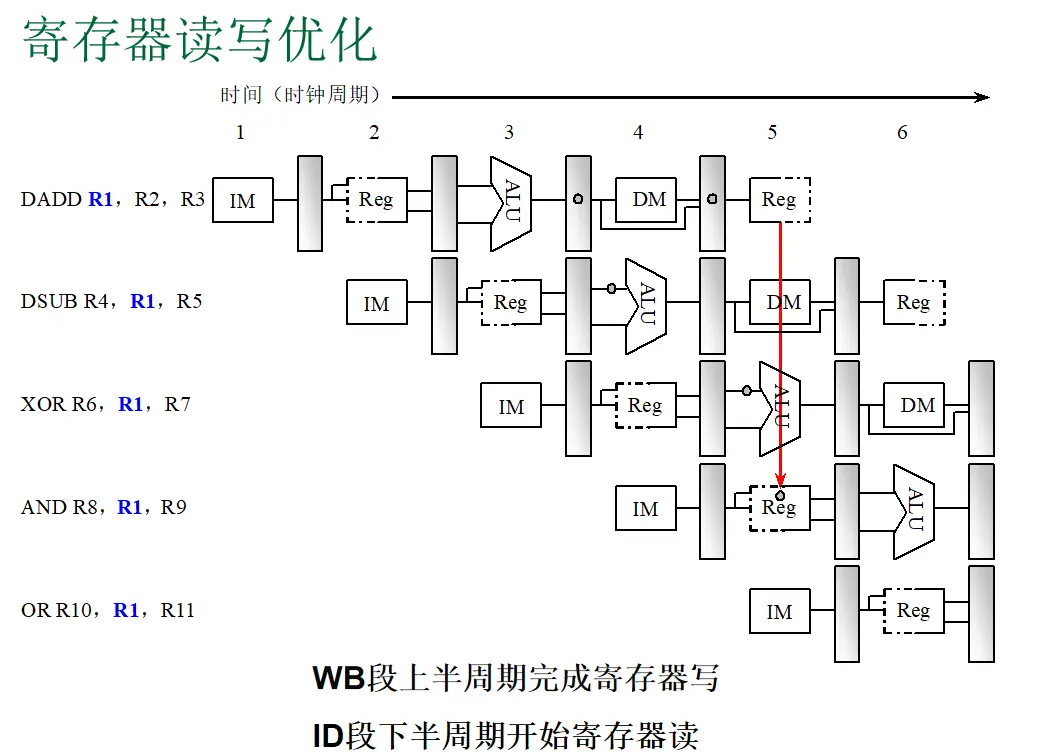
在无定向(无转发/旁路)的DLX流水线中,后一条指令必须等前一条指令完成WB(写回)后,才能在ID(读寄存器)段读到正确的数据(假设寄存器堆支持WB上半周期写、ID下半周期读,即WB与ID可在同一周期重叠)。
| 冲突 | 类型 | 停顿周期 | 原因详解 |
|---|---|---|---|
| (1) → (2) | RAW (R1) | 2 | (1) LW属于Load指令,数据在MEM段才从存储器读出,WB段才写入R1。(2) DADD在ID段就需读取R1。两者之间相隔EX、MEM两个阶段,因此需要停顿2个周期,等到(1)进入WB段后,(2)才能在ID段读取。 |
| (2) → (3) | RAW (R1) | 2 | (2) DADD是ALU指令,结果在EX段产生,WB段才写回R1。(3) SW在ID段读取R1作为store data。ALU→Store的数据相关在无定向时需等待2个周期。 |
| (4) → (5) | RAW (R2) | 2 | (4) ADD是ALU指令,(5) DSUB在ID段需读取R2。ALU→ALU的数据相关在无定向时需等待2个周期。 |
| (5) → (6) | RAW (R4) | 2 | (5) DSUB是ALU指令,(6) BNEZ在ID段需读取R4进行分支判断。ALU→Branch的数据相关在无定向时需等待2个周期。 |
| (6) | 控制冲突 | 1 | BNEZ在ID段判断分支,此时流水线中已经取入了顺序执行的下一条指令(非LOOP指令)。发现需要跳转后,必须清除该无效指令,造成1个周期的分支延迟。 |
| 合计 | — | 9 | 一次循环内由于各类冲突导致的流水线总停顿周期数。 |
第三步:有定向技术下的冲突分析与停顿周期
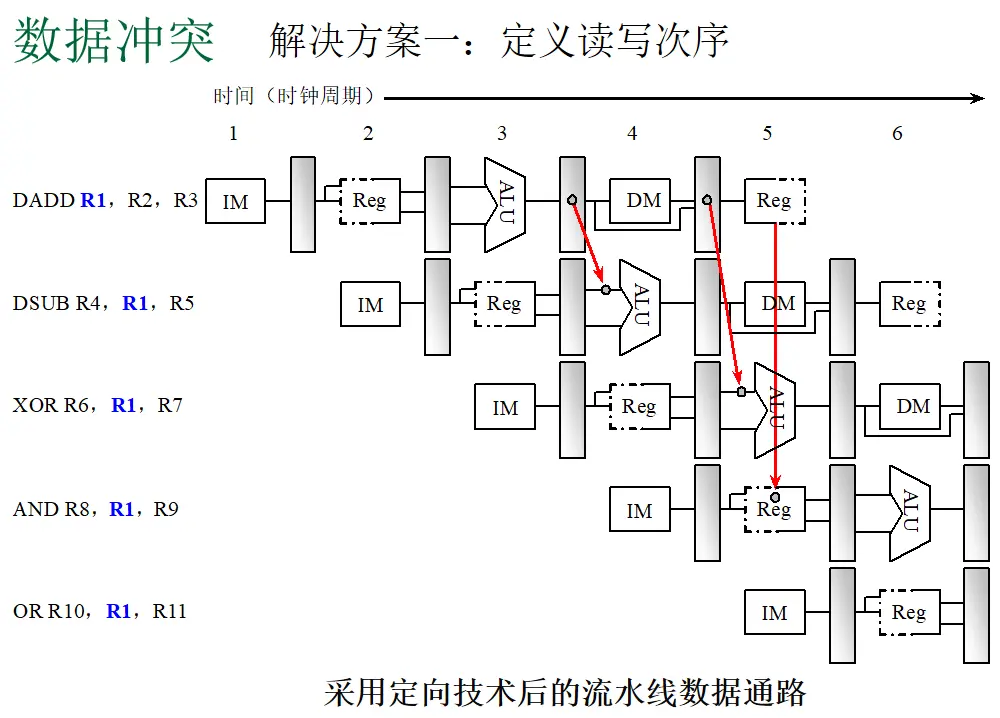
有定向(Forwarding/Bypassing)技术允许将指令在EX段或MEM段产生的中间结果,直接通过数据通路(旁路)传送给后续指令的ALU输入端或MEM段数据输入端,而无需等待WB段写回寄存器。
DLX流水线中的主要定向路径包括:
- EX/MEM → EX:将ALU运算结果直接传给下一条ALU指令的输入
- MEM/WB → EX:将Load读出的数据或ALU结果传给ALU指令的输入
- EX/MEM → MEM:将ALU结果传给Store指令的MEM段数据输入
| 冲突 | 类型 | 停顿周期 | 原因详解 |
|---|---|---|---|
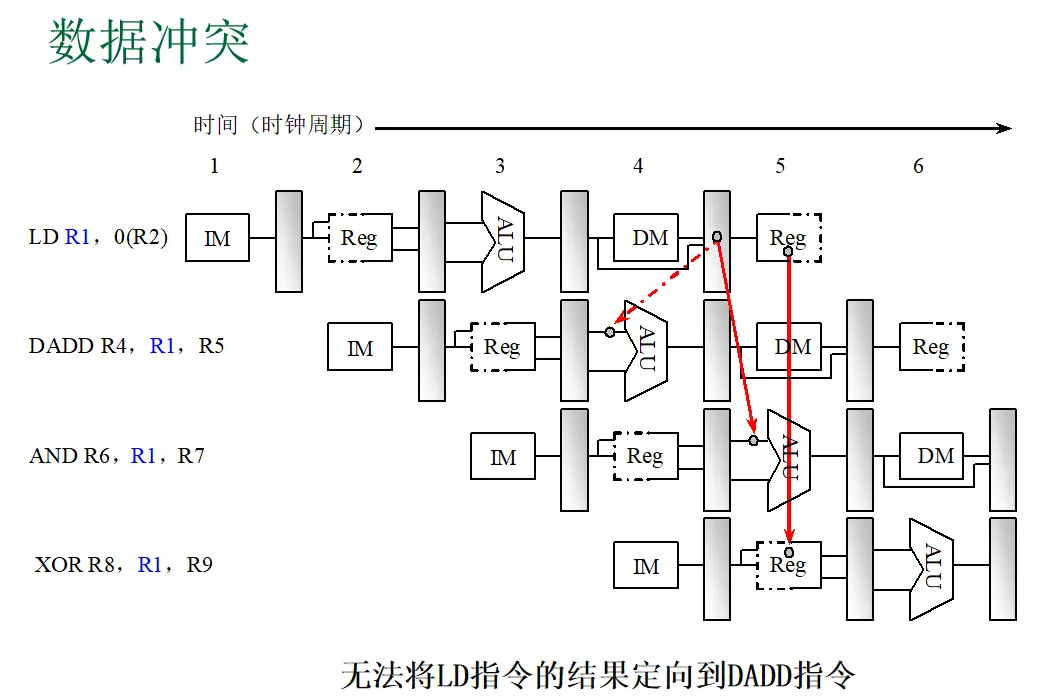
| (1) → (2) | RAW (R1) | 1 | 这是经典的Load-use冒险。LW指令的数据在MEM段末尾(周期4)才从存储器读出,而DADD指令的EX段在周期4开始时就需要R1进行运算。即使MEM/WB可以定向到EX,数据产生和使用在同一周期,来不及传递。因此DADD必须停顿1个周期,将EX段推迟到周期5,此时MEM/WB中的数据已稳定,可通过定向通路供给ALU。 |
| (2) → (3) | RAW (R1) | 0 | DADD在EX段产生的R1结果保存在EX/MEM寄存器中。SW指令虽然在ID段需要读取R1,但真正使用R1是在MEM段(作为写入存储器的数据)。EX/MEM(或随后的MEM/WB)完全可以通过定向通路将R1的结果送到SW的MEM段数据输入端,因此无需停顿。 |
| (4) → (5) | RAW (R2) | 0 | ADD在EX段计算R2的结果保存在EX/MEM寄存器中。DSUB在EX段需要R2作为ALU输入。通过EX/MEM → EX定向通路,ADD的结果可以直接送到DSUB的ALU输入端,因此无需停顿。 |
| (5) → (6) | RAW (R4) | 0 | DSUB在EX段计算R4的结果保存在EX/MEM寄存器中。BNEZ在ID段读取R4进行分支判断。DLX流水线中,分支指令的零检测结果(cond)可以通过定向通路获取EX/MEM中的ALU结果,或者分支判断本身可以延后到EX段进行。因此有定向时无需停顿。 |
| (6) | 控制冲突 | 0 | 控制冲突不属于定向技术的解决范畴。但在现代处理器中,通常采用分支预测、延迟分支槽或分支目标缓冲(BTB)等技术来消除分支延迟。若采用这些技术,控制冲突造成的停顿为0周期。 |
| 合计 | — | 1 | 有定向技术下,仅Load-use冒险需要1个周期停顿,其余数据相关均可通过定向通路解决。 |
结果汇总
| 技术条件 | 数据冲突停顿 | 控制冲突停顿 | 一次循环内总停顿 |
|---|---|---|---|
| 无定向技术 | 8 个周期 | 1 个周期 | 9 个周期 |
| 有定向技术 | 1 个周期 | 0 个周期 | 1 个周期 |
关键结论:
- Load-use冒险不可完全消除:即使采用了定向技术,Load指令的数据在MEM段末尾才产生,而紧接其后的ALU指令在EX段开头就需要该数据,两者在时间上存在1个周期的”不可重叠窗口”。这是5级流水线中唯一无法通过定向完全消除的数据冒险。
修正说明:在无定向技术下,ALU指令的结果在WB段才正式写回寄存器堆,后续指令必须在ID段等待该WB完成(即使WB与ID可在同周期重叠)。因此ALU→ALU、ALU→Store等RAW相关在无定向时均需停顿2个周期,而非之前误写的1个周期。
定向技术对ALU相关非常有效:ALU指令的结果在EX段就产生了,后续无论是ALU指令、Store指令还是Branch指令,都有足够的时间通过定向通路获取数据,因此不需要任何停顿。
控制冲突需要专门技术:定向技术只解决数据冲突,分支引起的控制冲突需要分支预测、延迟槽等专门机制来处理。
无定向技术下的流水线时空图(整体运行流程)
下面使用 HTML 表格绘制 DLX 5 级流水线在无定向技术下的完整执行过程。横向为时钟周期,纵向为指令流。每个方格标注该指令在该周期所处的流水段。
图例说明:
| 颜色 | 流水段 | 含义 |
|---|---|---|
| IF | 取指(Instruction Fetch) | |
| ID | 译码/读寄存器(Instruction Decode) | |
| EX | 执行/有效地址计算(Execute) | |
| MEM | 访存(Memory Access) | |
| WB | 写回(Write Back) | |
| S | 停顿/气泡(Stall) | |
| flush | 被冲刷的无效指令 |
| 指令 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (1) LW R1,4(R2) | IF | ID | EX | MEM | WB | |||||||||||||||
| (2) DADD R1,R1,#1 | IF | S | S | ID | EX | MEM | WB | |||||||||||||
| (3) SW R1,0(R2) | IF | S | S | ID | EX | MEM | WB | |||||||||||||
| (4) ADD R2,R2,#4 | IF | ID | EX | MEM | WB | |||||||||||||||
| (5) DSUB R4,R3,R2 | IF | S | S | ID | EX | MEM | WB | |||||||||||||
| (6) BNEZ R4,LOOP | IF | S | S | ID | EX | MEM | WB | |||||||||||||
| (7) 顺序指令(flush) | IF | flush | ||||||||||||||||||
| (1') LW(下轮循环) | IF | ID | EX | MEM | WB |
图:无定向技术下,一次循环的完整流水线时空图(横向为时钟周期)
无定向流水线时空图解读:
(1) LW → (2) DADD(周期3-4停顿):
- (2) 在周期3进入ID段,需读取R1。(1) 的R1要到周期5的WB段才写回。
- 冒险检测在周期3发现 (1) 的目的寄存器R1在ID/EX(且MemRead=1),周期4发现R1在EX/MEM,均stall。
- 周期5:(1) 进入WB,(2) 可在ID段读取R1(WB上半周期写,ID下半周期读)。
(2) DADD → (3) SW(周期6-7停顿):
- (3) 在周期6进入ID段,需读取R1(store data)。(2) 的R1要到周期8的WB段才写回。
- (3) 在ID段检测到 (2) 的目的R1仍在流水线中(周期6在EX,周期7在MEM),连续stall两周期。
(4) ADD → (5) DSUB(周期10-11停顿):
- (5) 在周期10进入ID段,需读取R2。(4) 的R2要到周期13的WB段才写回。
- (4) 在周期10进入ID,周期11进入EX,(5) 在ID段检测冲突并stall两周期。
(5) DSUB → (6) BNEZ(周期13-14停顿):
- (6) 在周期13进入ID段,需读取R4。(5) 的R4要到周期17的WB段才写回。
- (5) 在周期13进入EX,周期14进入MEM,(6) 连续stall两周期。
控制冲突(周期16-17):
- (6) BNEZ 在周期16的EX段判断R4≠0,决定跳回LOOP。
- 但周期15 IF已取入顺序下一条指令 (7),周期16 IF继续取下一条。
- 发现跳转后,IF/ID中的 (7) 被flush(周期17标灰)。
- 周期17 IF重新取 (1) LW,开始下一轮循环。
有定向技术下的流水线时空图(整体运行流程)
在有定向(Forwarding)技术下,ALU 运算结果可通过旁路直接传递,Load-use 冒险仅需1个周期停顿。假设同时采用分支预测技术消除控制冲突。
| 指令 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (1) LW R1,4(R2) | IF | ID | EX | MEM | WB | ||||||||
| (2) DADD R1,R1,#1 | IF | S | ID | EX | MEM | WB | |||||||
| (3) SW R1,0(R2) | IF | ID | EX | MEM | WB | ||||||||
| (4) ADD R2,R2,#4 | IF | ID | EX | MEM | WB | ||||||||
| (5) DSUB R4,R3,R2 | IF | ID | EX | MEM | WB | ||||||||
| (6) BNEZ R4,LOOP | IF | ID | EX | MEM | WB | ||||||||
| (1') LW(下轮循环) | IF | ID | EX | MEM | WB |
图:有定向技术下,一次循环的完整流水线时空图(假设分支预测消除控制冲突)
有定向流水线时空图解读:
(1) LW → (2) DADD(周期3停顿1周期):
- 这是经典的 Load-use 冒险。(2) 在周期4进入ID段,(1) 在周期4进入MEM段,数据刚从存储器读出但尚未稳定写入流水线寄存器。
- 即使 MEM/WB → EX 的定向通路存在,数据产生(MEM段末尾)与使用(EX段开头)仍相差半个时钟周期,来不及传递。
- 因此 (2) 必须在周期3插入一个气泡,将EX段推迟到周期5,此时 (1) 的数据已进入MEM/WB,可通过定向供给ALU。
(2) DADD → (3) SW(0停顿):
- (2) 在周期5的EX段产生R1结果,保存在EX/MEM寄存器中。
- (3) SW 在周期7的MEM段才需要将R1写入存储器(store data)。
- 通过 EX/MEM → MEM 定向通路,(2) 的ALU结果可直接送到 (3) 的MEM段数据输入端,无需停顿。
(4) ADD → (5) DSUB(0停顿):
- (4) 在周期8的EX段产生R2结果。
- (5) 在周期9的EX段需要R2作为ALU输入。
- 通过 EX/MEM → EX 定向通路,(4) 的ALU结果可直接送到 (5) 的ALU输入端,无需停顿。
(5) DSUB → (6) BNEZ(0停顿):
- (5) 在周期10的EX段产生R4结果。
- (6) BNEZ 的分支判断在EX段进行(通过ALU比较或专用”=0?”电路)。
- 通过 EX/MEM → EX 定向通路,(5) 的结果可直接用于分支判断,无需停顿。
控制冲突(0停顿):
- 假设采用分支目标缓冲(BTB)或延迟分支槽技术。
- (6) 在周期9 IF阶段即可确定跳转目标,周期10直接取 (1’) LW,流水线中无气泡插入。
两图对比总结
| 对比维度 | 无定向技术 | 有定向技术 |
|---|---|---|
| (1)→(2) LW→DADD | Stall 2 周期 | Stall 1 周期(Load-use) |
| (2)→(3) DADD→SW | Stall 2 周期 | 0 周期(EX/MEM→MEM定向) |
| (4)→(5) ADD→DSUB | Stall 2 周期 | 0 周期(EX/MEM→EX定向) |
| (5)→(6) DSUB→BNEZ | Stall 2 周期 | 0 周期(EX/MEM→EX定向) |
| (6) 控制冲突 | Flush 1 条指令 | 0 周期(分支预测) |
| 一次循环总周期数 | 20 个周期 | 13 个周期 |
| CPI(每指令周期数) | 20/6 ≈ 3.33 | 13/6 ≈ 2.17 |
核心洞察:
- 定向技术消除了绝大多数数据冲突带来的停顿,仅保留了 Load-use 这一个”硬骨头”。原因在于 Load 数据在 MEM 段末尾才产生,而下一条 ALU 指令在 EX 段开头就需要它,两者在时间上存在不可压缩的1周期窗口。
- 若想在有定向基础上进一步消除 Load-use 停顿,需要采用编译器调度(将不相关指令插入 Load 和 use 之间)或流水线深度优化(如将 MEM 段进一步拆分)。
- 控制冲突不属于定向技术的范畴,但在现代处理器中,分支预测(尤其是动态分支预测器)的准确率可达 95% 以上,能将分支开销降至接近零。
深入理解:为什么 Load-use 必须 Stall,而 ALU-use 可以定向消除?
这是流水线冲突分析中最核心、也最容易混淆的概念。要真正理解它,必须先厘清一个根本问题:不同的指令,其”有用数据”是在流水线的哪一段产生的?
一、两类指令的数据产生时机:ALU vs Load
DLX 5 级流水线中,算术/逻辑指令和Load 指令产生最终数据的位置完全不同。
| 指令类型 | 举例 | EX 段做什么 | MEM 段做什么 | 最终数据产生段 |
|---|---|---|---|---|
| ALU 指令 | DADD R1,R1,#1 |
ALU 做加法运算:R1_old + 1 = R1_new |
透传(不做任何操作) | EX 段;ALU 输出端 |
| Load 指令 | LW R1,4(R2) |
ALU 做地址计算:R2 + 4 = 有效地址 |
从数据存储器中读出数据;存储器[有效地址] → R1 的值 | MEM 段;数据存储器输出端 |
这就是关键区别:
- ALU 指令:数据在 EX 段 由 ALU “算” 出来。ALU 是组合逻辑,给一个周期就能算出结果。
- Load 指令:数据在 MEM 段 从存储器 “读” 出来。存储器访问比 ALU 慢,需要整整一个周期才能读出数据。
换句话说,Load 的 EX 段算出来的只是地址(一个中间结果),真正的数据要到 MEM 段末尾才从存储器冒出来。而 ALU 指令的 EX 段直接算出来的就是最终结果。
二、地址值 vs 数据值:LW 指令内部就分了两步
让我们把 LW R1, 4(R2) 这条指令在流水线中到底发生了什么,彻底拆开来看:
1 | IF 段:从指令存储器取出 LW 指令本身 |
注意上面有两个截然不同的值:
| 值的名称 | 产生位置 | 是什么 | 用途 |
|---|---|---|---|
| 地址值(Address) | EX 段 | R2 + 4 的结果 |
送往 MEM 段,告诉存储器”去哪里读” |
| 数据值(Data) | MEM 段 | 存储器[地址] 读出的内容 | 送往 WB 段,最终写入寄存器 R1 |
而 DADD R1, R1, #1 内部只有一步:
1 | IF 段:取指令 |
ALU 指令的 EX 段直接产生的就是最终结果。没有”先算地址再去存储器读数”这个过程。
三、定向通路能传递什么?
定向(Forwarding)也叫旁路(Bypass),它的本质是在结果正式写回寄存器堆之前,把流水线寄存器中暂存的结果提前截胡,直接送给后面指令需要的输入端。
DLX 流水线中的主要定向通路:
| 定向通路 | 数据来源 | 数据目的地 | 传递的是什么 |
|---|---|---|---|
| EX/MEM → EX | 上条指令 EX 段结果 | 下条指令 ALU 输入 | ALU 运算结果(如 DADD 的和) |
| MEM/WB → EX | 上条指令 MEM 段结果 | 下条指令 ALU 输入 | 存储器读出的数据(如 LW 的数据)或透传的 ALU 结果 |
| EX/MEM → MEM | 上条指令 EX 段结果 | 下条指令 MEM 段数据输入 | ALU 运算结果(作为 SW 的 store data) |
定向通路只能传递”已经产生的数据”。它不能加速存储器的读取,也不能让数据提前产生。
四、ALU-use 定向成功的时间线(以 ADD → DSUB 为例)
1 | 周期N: ADD 在 EX 段做加法 DSUB 在 ID 段读寄存器 |
为什么成功?
ADD 的数据(R2_new)在周期 N 末尾就产生了,保存在 EX/MEM 中。
DSUB 在周期 N+1 的 EX 段才需要使用 R2。
从”数据产生”到”数据使用”之间,有至少 1 个完整时钟周期的缓冲时间。定向通路完全可以在这段时间内把数据送过去。
五、Load-use 定向失败的时间线(以 LW → DADD 为例)
1 | 周期N: LW 在 EX 段算地址 DADD 在 ID 段读寄存器 |
为什么失败?
LW 的数据值(不是地址值)在周期 N+1 末尾才产生。
DADD 的 ALU 在周期 N+1 开头就需要输入。
两者发生在同一个周期内,而且数据产生比数据使用还晚半个周期。
这就像你 8:00 要赶到教室考试,但试卷 8:00 才从印刷厂送出来——你根本拿不到试卷,定向通路再快也解决不了”数据还没产生”的问题。
六、为什么插入 1 个 Stall 就能解决 Load-use?
插入 1 个气泡后,DADD 的 EX 段被推迟到周期 N+2:
1 | 周期N: LW EX(算地址) |
现在:
- LW 的数据在周期 N+1 末尾写入 MEM/WB
- DADD 在周期 N+2 的 EX 段才需要数据
- 从”数据产生”到”数据使用”之间有了1 个完整周期的缓冲
- 定向通路成功!
这就是 Load-use 必须 Stall 恰好 1 周期的数学本质:给它挪出 1 个周期的”提前量”。
七、Store 指令再辨析:SW 到底在 ID 读不读 R1?
回到用户最初的问题:SW R1, 0(R2) 这条指令的 ID 段到底做了什么?
1 | SW R1, 0(R2) 在流水线中的行为: |
关键点:SW 在 ID 段确实读了 R1,而且读到的是旧值。但在有定向的情况下:
如果上一条是 ALU 指令(如 DADD R1,R1,#1):DADD 的结果在 EX 段末尾就产生,存在 EX/MEM 中。SW 在 MEM 段需要 R1 时,EX/MEM → MEM 定向通路会覆盖掉 ID/EX.B 中的旧值,用新值作为 store data。所以不需要 Stall。
如果上一条是 Load 指令(如 LW R1,0(R2)):LW 的数据在 MEM 段末尾才产生。SW 在 MEM 段使用 R1 时,Load-use 冒险同样存在。这时 MEM/WB → MEM 的定向理论上可以工作,但实际上 Load 的结果刚从存储器出来,SW 的 MEM 在同一周期也要用,可能仍然需要 Stall(具体取决于流水线实现,考试中通常认为 Load 后紧跟 Store 使用同一寄存器也需要 stall)。
八、一张图看懂所有冲突的”时间差”
| 冲突对 | 前指令数据产生段/时刻 | 后指令数据使用段/时刻 | 时间差 | 有定向 Stall? | 无定向 Stall? |
|---|---|---|---|---|---|
| LW → DADD(Load-use) | MEM 段末尾 | EX 段开头(同一周期) | 负半个周期;数据还没来就用 | Stall 1 | Stall 2 |
| DADD → SW | EX 段末尾 | MEM 段末尾(差 2 周期) | +2 个周期;时间充裕 | Stall 0 | Stall 2 |
| ADD → DSUB | EX 段末尾 | EX 段开头(差 1 周期) | +1 个周期;来得及 | Stall 0 | Stall 2 |
| DSUB → BNEZ | EX 段末尾 | ID/EX 段(差 1 周期) | +1 个周期;来得及 | Stall 0 | Stall 2 |
一眼看懂的规律:
- 只要”数据产生”比”数据使用”早至少 1 个完整周期,定向通路就能搞定 → Stall = 0
- 唯一例外是 Load → ALU:数据在 MEM 末尾产生,下一条的 EX 在同一周期开头就要用 → 时间差为负 → 必须 Stall
九、终极记忆口诀
ALU 结果在 EX 出,Load 数据在 MEM 读。
EX 比 EX 晚一周期,定向轻松来得及。
MEM 比 EX 晚半拍,Load-use 躲不开。
插入气泡推一下,定向才能送过去。
翻译:
- ALU 指令的结果在 EX 段产生,Load 指令的数据在 MEM 段从存储器读出。
- 如果前指令是 ALU,后指令也是 ALU,后一条的 EX 比前一条的 EX 晚 1 周期,定向来得及。
- 如果前指令是 Load,后指令是 ALU,后一条的 EX 和前一条的 MEM 在同一周期,而且 MEM 比 EX 还晚,定向来不及。
- 必须插入 1 个气泡把后一条的 EX 推后 1 周期,定向才能成功。
十、补充:现代 CPU 如何进一步优化 Load-use?
在考试范围内,Load-use 必须 Stall 1 周期。但在现代高性能 CPU 中,还有一些进阶手段:
| 技术 | 原理 | 效果 |
|---|---|---|
| 编译器调度 | 编译器在 LW 和 DADD 之间插入无关指令 | 消除气泡,但需要足够的指令级并行性 |
| 非阻塞 Cache / 乱序执行 | Load 未命中时不 stall,先执行后面无关指令 | 隐藏延迟,但实现复杂 |
| Load 提前启动 | 把地址计算提前到 ID 段,存储器访问提前开始 | 压缩 Load 延迟,但需要额外硬件支持 |
| 值预测 | 猜测 Load 读出的值,错了再回滚 | 激进但复杂,主要用于科研 |
考试记住一句话就够了:5 级 DLX + 定向,Load-use 必须 stall 1,其余 RAW 定向全消。
系统架构设计
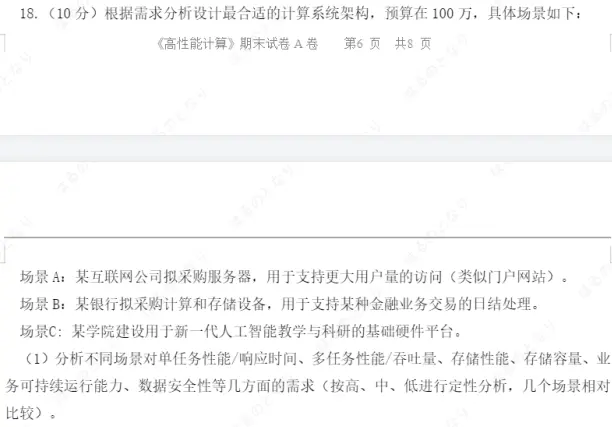
题目: 根据需求分析设计最合适的计算系统架构,预算在 100 万,具体场景如下:
- 场景 A:某互联网公司拟采购服务器,用于支持更大用户量的访问(类似门户网站)。
- 场景 B:某银行拟采购计算和存储设备,用于支持某种金融业务交易的日结处理。
- 场景 C:某学院建设用于新一代人工智能教学与科研的基础硬件平台。
第 (2) 问要求:设计适合不同场景的服务器计算系统结构,画出模型架构图,并做特色介绍。
可选设备和大致成本如下:
| 设备型号 | 配置规格 | 价格区间 | 适合定位 |
|---|---|---|---|
| A 型普通服务器 | 2 个 8 核 CPU、128G 内存、1T 外存 | 约 5 万元 | Web 节点、负载均衡节点、轻量管理节点 |
| B 型普通服务器 | 2 个 16 核 CPU、256G 内存、4T 外存 | 约 20 万元 | 数据库节点、核心应用节点、GPU 承载节点 |
| C 型 IBM 小型机 | 不同配置 | 30-50 万元 | 高可靠关键业务主机 |
| D 型存储服务器 | 2 个 8 核 CPU、128G 内存、4T-32T RAID 存储 | 20-40 万元 | 集中存储、备份、共享文件系统 |
| GPU 加速卡 | 两种型号 | 8 万 / 20 万元每块 | AI 训练、推理、矩阵计算加速 |
解答:
这道题的本质是“先判断业务负载,再选择系统结构,最后按预算落到具体设备组合”。不同场景的瓶颈完全不同:门户网站重并发,银行日结重可靠和安全,AI 平台重并行加速能力。
(1) 需求定性分析
这里按业务逻辑重新分析需求,银行场景的数据安全性应按高处理。
| 场景 | 单任务性能/响应时间 | 多任务性能/吞吐量 | 存储性能 | 存储容量 | 业务可持续运行能力 | 数据安全性 | 专用加速/并行能力 |
|---|---|---|---|---|---|---|---|
| 场景 A | 高 | 高 | 中 | 中 | 高 | 中 | 低 |
| 场景 B | 高 | 中 | 高 | 中 | 高 | 高 | 低 |
| 场景 C | 中 | 中 | 高 | 高 | 中 | 中 | 高 |
分析思路:
- 场景 A(门户网站):访问请求数量大,核心矛盾是高并发和高吞吐;单个请求不一定复杂,但响应时间要短,因此应使用多台普通服务器水平扩展。
- 场景 B(银行日结):金融业务必须保证数据正确、安全、可恢复;日结处理通常是关键批处理任务,适合高可靠主机配合 RAID 存储和主备机制。
- 场景 C(AI 教学科研):AI 任务的主要瓶颈不是普通 Web 并发,而是 GPU 并行计算能力、训练数据集存储和多用户资源调度。
(2) 场景 A:门户网站用户访问服务器
推荐架构:负载均衡 + 多 Web 节点 + 数据/存储后端的水平扩展集群。
推荐设备组合(约 100 万):
| 设备 | 数量 | 单价估算 | 小计 | 用途 |
|---|---|---|---|---|
| A 型普通服务器 | 8 台 | 5 万 | 40 万 | Web/App 节点,其中 2 台可兼做双机负载均衡 |
| B 型普通服务器 | 2 台 | 20 万 | 40 万 | 数据库、缓存、核心业务服务主备节点 |
| D 型存储服务器 | 1 台低配 | 20 万 | 20 万 | 共享文件、日志、备份和静态资源存储 |
| 合计 | — | — | 约 100 万 | 满足高并发访问和可扩展需求 |
Nginx/LVS 主
Nginx/LVS 备
DB/Cache 主
DB/Cache 备
文件/日志/备份
特色介绍:
- 使用多台 A 型服务器承载 Web/App 层,单台节点故障不会导致整体服务不可用。
- 通过负载均衡把请求分发到多个节点,重点提升多任务吞吐量和并发访问能力。
- B 型服务器负责数据库、缓存和核心业务,配置更高,适合承担相对重的后端任务。
- D 型存储服务器用于日志、静态资源、备份和共享数据,满足中等存储需求。
- 后续用户量继续增长时,优先增加 A 型 Web 节点即可,扩展成本低。
(3) 场景 B:银行金融业务日结处理系统
推荐架构:双机热备小型机 + RAID 存储服务器的高可靠集中式架构。
推荐设备组合(约 100 万):
| 设备 | 数量 | 单价估算 | 小计 | 用途 |
|---|---|---|---|---|
| C 型 IBM 小型机 | 2 台低配 | 30 万 | 60 万 | 日结处理主机,主备热切换 |
| D 型存储服务器 | 1 台高配 | 40 万 | 40 万 | RAID 存储、交易数据、备份空间 |
| 合计 | — | — | 约 100 万 | 优先保证可靠性、连续运行和数据安全 |
主日结服务器
主备切换
备用服务器
交易数据/日志
权限/日志/恢复
特色介绍:
- 金融日结系统首先要求正确性、连续运行能力和数据安全性,因此优先选择 C 型小型机而不是大量廉价 Web 节点。
- 两台 C 型小型机组成主备结构,主机故障时由备用机接管,降低日结任务中断风险。
- D 型存储服务器采用 RAID,提升磁盘可靠性,并支持交易数据、日志、备份数据集中管理。
- 与门户网站相比,该场景不追求无限水平扩展,而是追求集中式事务处理、数据一致性和可恢复性。
- 银行业务的数据安全性必须按高需求处理,应配合访问控制、加密、审计日志和异地备份等措施。
(4) 场景 C:AI 教学与科研基础硬件平台
推荐架构:B 型服务器 + GPU 加速卡 + 共享存储的异构计算集群。
推荐设备组合(约 100 万):
| 设备 | 数量 | 单价估算 | 小计 | 用途 |
|---|---|---|---|---|
| B 型普通服务器 | 2 台 | 20 万 | 40 万 | GPU 计算节点,兼资源调度与用户登录 |
| GPU 加速卡 | 2 块高配 | 20 万 | 40 万 | AI 训练、推理、矩阵计算加速 |
| D 型存储服务器 | 1 台低配 | 20 万 | 20 万 | 数据集、模型、实验结果共享存储 |
| 合计 | — | — | 约 100 万 | 优先保证 AI 并行计算能力 |
可由 B 节点兼任
16 核 CPU + 高配 GPU
16 核 CPU + 高配 GPU
数据集 / 模型 / 结果 / 备份
特色介绍:
- AI 教学科研最需要的是 GPU 并行计算能力,CPU 服务器只作为调度、数据预处理和任务承载平台。
- 两台 B 型服务器分别配置高配 GPU,可支持模型训练、推理实验和矩阵计算。
- D 型存储服务器集中保存数据集、模型参数和实验结果,方便多用户共享。
- 如果更偏向“教学并发”而不是“单任务训练性能”,也可以把 2 块 20 万 GPU 替换为 4 块 8 万 GPU,获得更多可同时分配的 GPU 资源。
- 该方案不追求 7×24 金融级连续运行,而是强调科研算力、资源共享和用户隔离。
(5) 三个场景的架构对比总结
| 场景 | 推荐架构 | 设备组合核心 | 主要优化目标 |
|---|---|---|---|
| A | 负载均衡 + Web 集群 + 后端存储 | A 型多节点 + B 型后端 + D 型存储 | 高并发访问、吞吐量、水平扩展 |
| B | 双小型机热备 + RAID 存储 | C 型小型机主备 + D 型高可靠存储 | 日结可靠性、连续运行、数据安全 |
| C | GPU 异构计算集群 | B 型服务器 + GPU + D 型共享存储 | AI 并行计算、训练加速、教学科研共享 |
答题模板
考试中可以按下面这个逻辑组织答案:
- 先判断瓶颈:门户网站瓶颈是并发访问,银行日结瓶颈是可靠性和数据安全,AI 平台瓶颈是 GPU 算力。
- 再选择架构:高并发选集群,高可靠选主备小型机,高并行选 GPU 异构。
- 最后落到预算:把 100 万拆成计算节点、存储节点、加速设备三部分,说明每部分为什么必要。
一句话记忆:门户网站多买 A 做集群,银行系统买 C 做主备,AI 平台买 B 加 GPU。
多线程程序编写

题目: 编写一个程序,开启 3 个线程,这 3 个线程的 ID 分别为 A、B、C,每个线程将自己的 ID 在屏幕上打印 10 遍,要求输出结果必须按 ABC 的顺序显示,例如:
1 | ABCABCABCABCABCABCABCABCABCABC |
说明:操作系统可在 Windows / Linux 中任选一个;函数名记不清时可以在开头自己定义名称,但必须说明清楚功能。
解答:
这道题考察的不是“怎么创建线程”本身,而是多个线程之间如何同步,保证输出顺序固定为 A → B → C。如果三个线程各自直接循环打印,调度顺序由操作系统决定,输出可能变成 ACBBCA...,无法满足题目要求。
核心思路
设置一个共享变量 turn 表示当前轮到哪个线程打印:
turn 的值 |
允许打印的线程 | 打印后把 turn 改为 |
|---|---|---|
| 0 | A | 1 |
| 1 | B | 2 |
| 2 | C | 0 |
为了避免多个线程同时访问 turn,需要使用同步机制。这里选择 Linux pthread + 互斥锁 + 条件变量:
- 互斥锁
mutex:保护共享变量turn,防止多个线程同时修改。 - 条件变量
cond:当前线程没轮到自己时进入等待,轮到自己时被唤醒。 pthread_cond_broadcast:打印完成后唤醒其他线程,让下一个线程检查是否轮到自己。
伪代码
1 | // === 全局共享资源 === |
真实代码(Linux / pthread)
下面代码可在 Linux 下编译运行:
1 |
|
编译运行:
1 | gcc abc_threads.c -o abc_threads -pthread |
输出结果:
1 | ABCABCABCABCABCABCABCABCABCABC |
代码解释
| 代码结构 | 作用 |
|---|---|
turn |
控制当前应该由哪个线程输出,0/1/2 分别对应 A/B/C |
pthread_mutex_lock |
进入临界区前加锁,保证同一时刻只有一个线程检查和修改 turn |
while (turn != id) |
如果没轮到当前线程,就等待条件变量 |
pthread_cond_wait |
让当前线程睡眠,并自动释放互斥锁;被唤醒后会重新获得锁 |
printf("%c", ch) |
输出当前线程对应的字符 |
turn = (turn + 1) % 3 |
A 打印后轮到 B,B 打印后轮到 C,C 打印后重新轮到 A |
pthread_cond_broadcast |
唤醒所有等待线程,让它们重新检查 turn |
pthread_join |
主线程等待 A、B、C 三个线程全部结束 |
为什么要用 while 而不是 if?
条件变量可能出现“虚假唤醒”,也可能一次唤醒多个线程。如果用 if,线程被唤醒后可能不再检查条件,导致输出顺序错误。使用 while 可以保证线程每次醒来都重新判断:只有 turn == id 时才允许打印。
考试记忆:共享变量定顺序,互斥锁保安全,条件变量管等待;A 打印后 turn=1,B 打印后 turn=2,C 打印后 turn=0。
cache失效率
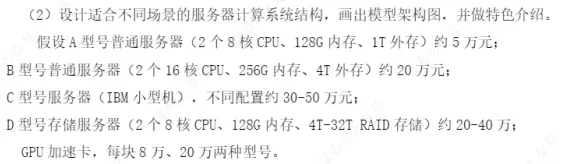
三种失效类型
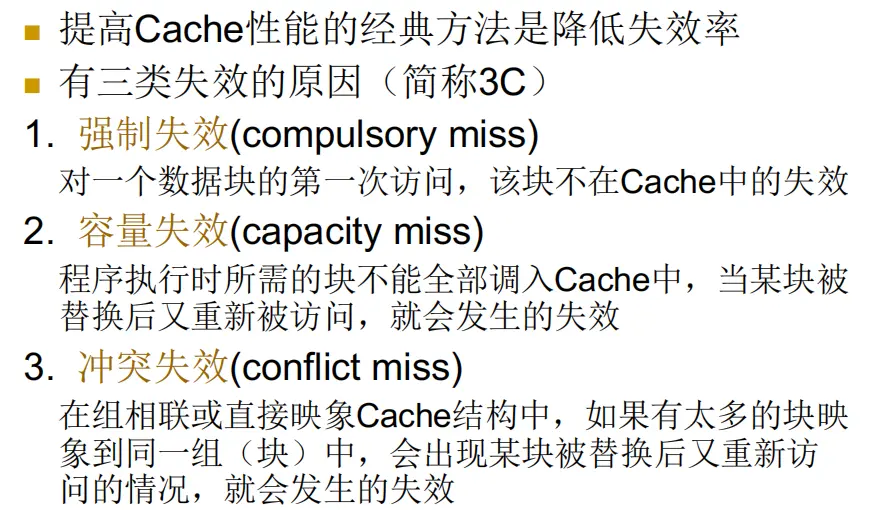
流水线冲突与依赖
在流水线处理器中,数据依赖和流水线冲突是两个极易混淆但本质不同的概念。依赖是程序本身的固有属性(无论有没有流水线都存在),冲突是流水线实现中由于依赖而产生的具体问题。
数据依赖
数据依赖描述的是指令与指令之间在数据上的序关系——后一条指令使用了前一条指令产生(或将要产生)的数据。它是程序语义的一部分,无法消除,只能通过流水线设计来妥善处理。
依赖分为三种,通过同一条指令的”读寄存器”和”写寄存器”操作是否重叠来判断:
| 依赖类型 | 英文名称 | 定义 | 指令序关系 | 场景举例 |
|---|---|---|---|---|
| 真数据相关(RAW) | Read After Write | 后一条指令读的数据必须由前一条指令写入 | 前写 → 后读 | ADD R1,R2,R3 → SUB R4,R1,R5 |
| 反相关(WAR) | Write After Read | 后一条指令写入之前,前一条指令必须先读完旧值 | 前读 → 后写 | ADD R1,R2,R3 → SUB R2,R4,R5 |
| 输出相关(WAW) | Write After Write | 两条指令写同一个寄存器,必须按先后顺序完成 | 先写 → 后写 | ADD R1,R2,R3 → SUB R1,R4,R5 |
三种依赖的直观理解:
- RAW(真依赖):A 算出一个结果,B 要用它。B 必须等 A 写完才能读。这是无法消除的依赖,是程序逻辑决定的。
- WAR(反依赖):A 要先读一个寄存器的旧值,B 之后要往同一个寄存器写新值。如果 B 在 A 读之前就写入了,A 就读到了错误的值。这种依赖可以通过寄存器重命名(Register Renaming)来消除。
- WAW(输出依赖):两条指令都要写同一个寄存器,写的顺序必须正确,否则最终寄存器里存的是谁的结果就不对了。同样可以通过寄存器重命名来消除。
关键区分:只有 RAW 是真依赖,它反映了数据从生产者到消费者的传递关系,无法消除。WAR 和 WAW 是”假依赖”(False Dependence / Name Dependence),本质上是寄存器名不够用导致的名字冲突,不是真正的数据传递需求。
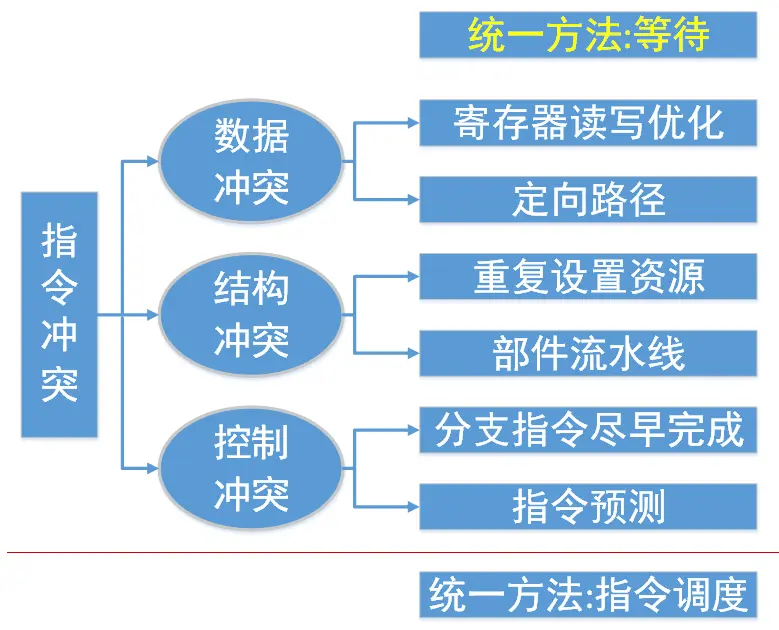
流水线冲突
冲突指的是在流水线的具体实现中,由于硬件资源限制或指令间的依赖关系,导致下一条指令无法在预期时钟周期内执行的情况。冲突是流水线实现层面产生的问题。
| 冲突类型 | 英文名称 | 产生原因 | 典型场景 | 常见解决方案 |
|---|---|---|---|---|
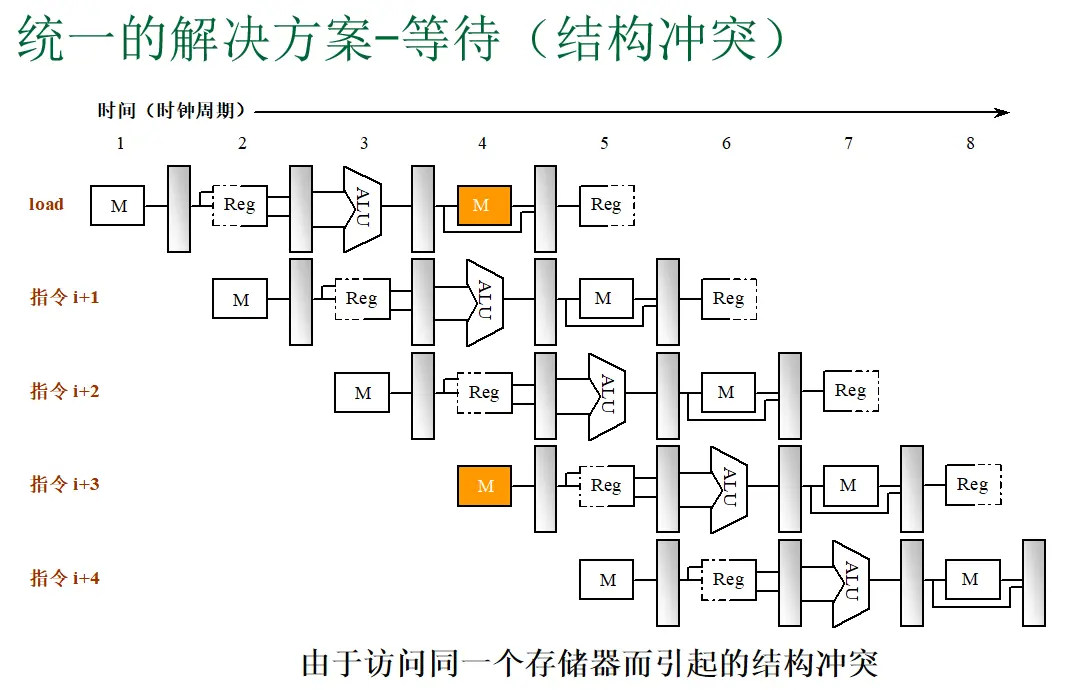
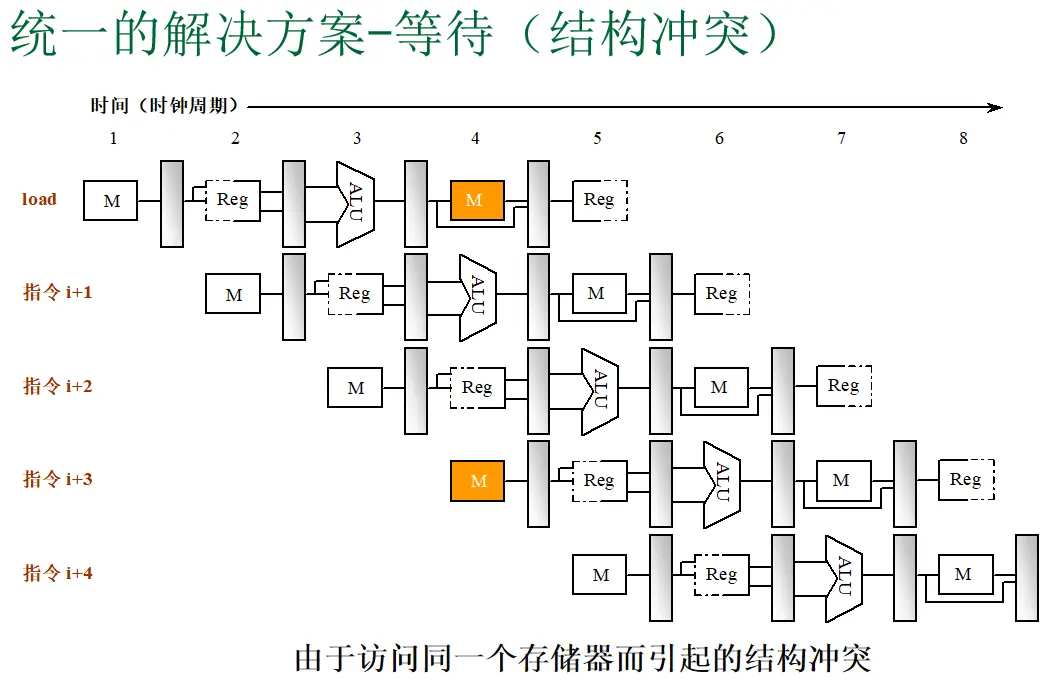
| 结构冲突 | Structural Hazard | 硬件资源不足,多条指令在同一周期争用同一个功能部件 | 单端口存储器无法同时取指和访存;单套 ALU 无法同时做地址计算和数据运算 | 增加硬件资源(如分离指令 Cache 和数据 Cache);流水化功能部件 |
| 数据冲突 | Data Hazard | 指令间的数据依赖导致流水线重叠执行时数据尚未就绪 | RAW:LW R1,0(R2) → ADD R3,R1,R4(Load-use 冒险) |
定向/旁路(Forwarding/Bypass);插入气泡(Stall);编译器指令调度 |
| 控制冲突 | Control Hazard | 分支指令和跳转指令改变了程序顺序,流水线中已取入的后续指令可能无效 | BNEZ R1,LOOP 判断前已取了下一条 |
分支预测(静态/动态);延迟分支槽(Delay Slot);提前计算分支目标 |
三种冲突的详细分析:
1. 结构冲突:在 DLX 5 级流水线中,取指(IF)和访存(MEM)都可能访问存储器。如果采用的是统一的高速缓存(单一端口),这两者就会争抢同一个硬件资源。经典解决方案是采用哈佛结构——指令 Cache 和数据 Cache 分离,这样 IF 段和 MEM 段各自有独立的访存通道,结构冲突自然消除。
2. 数据冲突:这是三种冲突中最常见的。核心矛盾是:前一条指令的结果还没有写入寄存器,后一条指令就要从寄存器读出。数据冲突又可细分为:
| 子类型 | 说明 | 停顿需求(有定向) |
|---|---|---|
| ALU → ALU | 算术指令结果 → 下一条算术指令输入 | 0(EX/MEM → EX 定向) |
| ALU → Store | 算术指令结果 → SW 指令的存储数据 | 0(EX/MEM → MEM 定向) |
| Load → ALU | Load-use 冒险,Load 数据在 MEM 末尾产生,下一条 ALU 的 EX 在同期开始 | 1(必须 Stall) |
| Load → Store | Load 数据用于 Store 的存储数据 | 0 或 1(取决于具体实现) |
3. 控制冲突:分支指令在执行阶段(EX)才能确定是否跳转,但此时流水线中已经取入了后续两条顺序指令。如果分支成功,这两条指令必须被冲刷(Flush),造成 2 个周期的开销。在 ID 段提前判断分支可将开销减为 1 个周期。
依赖与冲突的区别(概念辨析题重点)
这是选择题和判断题中高频混淆考点,务必理清二者的关系。
| 对比维度 | 数据依赖 | 流水线冲突 |
|---|---|---|
| 本质 | 程序语义层面的属性,由指令间的数据生产和消费关系决定 | 流水线实现层面的问题,由硬件资源和指令重叠执行导致 |
| 存在范围 | 任何执行方式(串行、流水线、超标量)下都存在 | 仅在流水线或并行执行中存在 |
| 是否可消除 | 不可消除(RAW 是真依赖,反映程序逻辑;WAR/WAW 可通过重命名消除) | 可以通过硬件/软件手段消除或缓解 |
| 因果关系 | 依赖是”因” | 冲突是”果”——依赖在流水线中表现为冲突 |
| 典型关系 | 有依赖不一定有冲突(如依赖距离足够远) | 有冲突必定有依赖(冲突的根源是依赖) |
一句话记忆:
依赖是程序的 DNA,冲突是流水线实现不当时出现的”症状”。依赖不可消除,冲突可以解决。
为什么”有依赖不一定有冲突”?
假设指令 (1) ADD R1,R2,R3 和指令 (5) SUB R4,R1,R5 之间存在 RAW 依赖(都涉及 R1)。但在 5 级流水线中,ADD 的 WB 在周期 5(假设 ADD 的 IF 在周期 1),SUB 的 ID 在周期 5。如果寄存器堆支持 WB 上半周期写、ID 下半周期读,那么 SUB 在同一周期就能读到 ADD 刚写入的 R1。依赖依然存在,但由于两条指令之间有足够的间隔,冲突没有发生。 反之,如果两条指令紧挨着(如 ADD 在指令 (1)、SUB 在指令 (2)),依赖就会表现为数据冲突,需要定向或停顿来化解。
为什么 WAR 和 WAW 在 DLX 5 级流水线中不会产生冲突?
DLX 5 级流水线是按序发射、按序完成的。所有指令按程序顺序进入流水线,WB 段也严格按程序顺序写回。因此:
- WAR 不会发生:后一条指令写寄存器的 WB 段一定晚于前一条指令读寄存器的 ID 段(因为后一条指令的所有段都滞后)。
- WAW 不会发生:后一条指令的 WB 段一定晚于前一条指令的 WB 段,写的顺序天然正确。
但在乱序执行(Out-of-Order Execution)的处理器中,指令可能不按程序顺序完成,WAR 和 WAW 冲突就会实际发生,这时就需要寄存器重命名来解决。
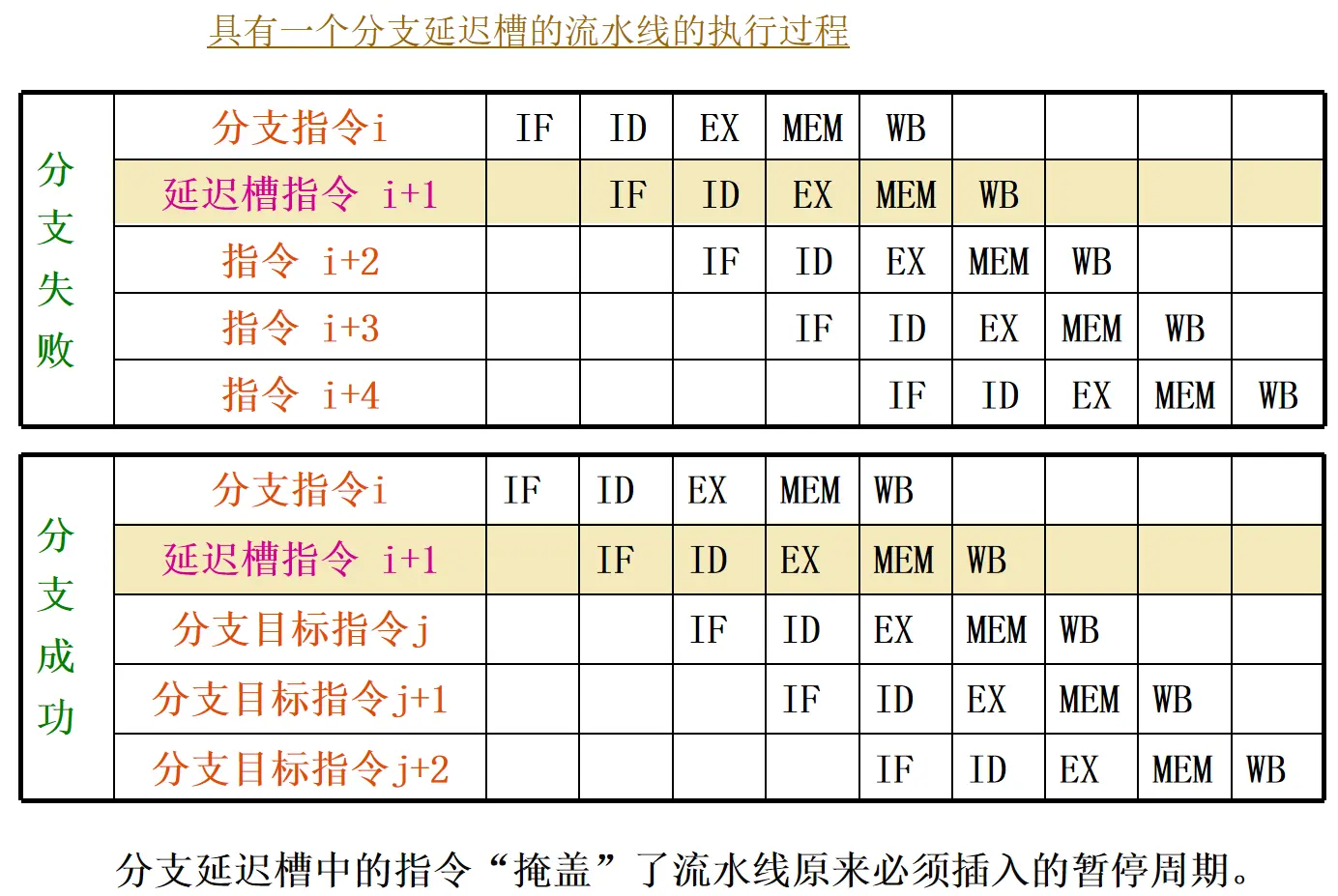
流水线延迟槽